#include <default_collisions.hpp>
Public Member Functions | |
| std::string | getName () const override |
| Returns the name of the setup step. More... | |
| std::vector< std::string > | getCollidingLinks () |
| void | linkPairsToSRDF () |
| Output Link Pairs to SRDF Format. More... | |
| void | linkPairsToSRDFSorted (size_t skip_mask=0) |
| Output Link Pairs to SRDF Format; sorted; with optional filter. More... | |
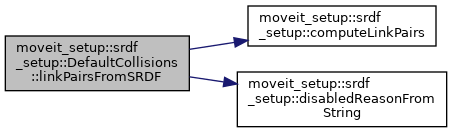
| void | linkPairsFromSRDF () |
| Load Link Pairs from SRDF Format. More... | |
| LinkPairMap & | getLinkPairs () |
| void | startGenerationThread (unsigned int num_trials, double min_frac, bool verbose=true) |
| void | cancelGenerationThread () |
| void | joinGenerationThread () |
| int | getThreadProgress () const |
 Public Member Functions inherited from moveit_setup::srdf_setup::SRDFStep Public Member Functions inherited from moveit_setup::srdf_setup::SRDFStep | |
| void | onInit () override |
| Overridable initialization method. More... | |
| bool | isReady () const override |
| Return true if the data necessary to proceed with this step has been configured. More... | |
| bool | hasGroups () const |
| Public Member Functions inherited from moveit_setup::SetupStep | |
| SetupStep ()=default | |
| SetupStep (const SetupStep &)=default | |
| SetupStep (SetupStep &&)=default | |
| SetupStep & | operator= (const SetupStep &)=default |
| SetupStep & | operator= (SetupStep &&)=default |
| virtual | ~SetupStep ()=default |
| void | initialize (const rclcpp::Node::SharedPtr &parent_node, const DataWarehousePtr &config_data) |
| Called after construction to initialize the step. More... | |
| const rclcpp::Logger & | getLogger () const |
| Makes a namespaced logger for this step available to the widget. More... | |
Protected Member Functions | |
| void | generateCollisionTable (unsigned int num_trials, double min_frac, bool verbose) |
Protected Attributes | |
| LinkPairMap | link_pairs_ |
| main storage of link pair data More... | |
| boost::thread | worker_ |
| unsigned int | progress_ |
| Protected Attributes inherited from moveit_setup::srdf_setup::SRDFStep | |
| std::shared_ptr< SRDFConfig > | srdf_config_ |
| Protected Attributes inherited from moveit_setup::SetupStep | |
| DataWarehousePtr | config_data_ |
| rclcpp::Node::SharedPtr | parent_node_ |
| std::shared_ptr< rclcpp::Logger > | logger_ |
Detailed Description
Definition at line 56 of file default_collisions.hpp.
Member Function Documentation
◆ cancelGenerationThread()
| void moveit_setup::srdf_setup::DefaultCollisions::cancelGenerationThread | ( | ) |

◆ generateCollisionTable()
|
protected |
Definition at line 158 of file default_collisions.cpp.


◆ getCollidingLinks()
| std::vector< std::string > moveit_setup::srdf_setup::DefaultCollisions::getCollidingLinks | ( | ) |
Definition at line 43 of file default_collisions.cpp.
◆ getLinkPairs()
|
inline |
Definition at line 82 of file default_collisions.hpp.
◆ getName()
|
inlineoverridevirtual |
Returns the name of the setup step.
Implements moveit_setup::SetupStep.
Definition at line 59 of file default_collisions.hpp.
◆ getThreadProgress()
| int moveit_setup::srdf_setup::DefaultCollisions::getThreadProgress | ( | ) | const |

◆ joinGenerationThread()
| void moveit_setup::srdf_setup::DefaultCollisions::joinGenerationThread | ( | ) |

◆ linkPairsFromSRDF()
| void moveit_setup::srdf_setup::DefaultCollisions::linkPairsFromSRDF | ( | ) |
Load Link Pairs from SRDF Format.
Definition at line 113 of file default_collisions.cpp.
◆ linkPairsToSRDF()
| void moveit_setup::srdf_setup::DefaultCollisions::linkPairsToSRDF | ( | ) |
Output Link Pairs to SRDF Format.
Definition at line 50 of file default_collisions.cpp.

◆ linkPairsToSRDFSorted()
| void moveit_setup::srdf_setup::DefaultCollisions::linkPairsToSRDFSorted | ( | size_t | skip_mask = 0 | ) |
Output Link Pairs to SRDF Format; sorted; with optional filter.
- Parameters
-
skip_mask mask of shifted DisabledReason values that will be skipped
Definition at line 74 of file default_collisions.cpp.

◆ startGenerationThread()
| void moveit_setup::srdf_setup::DefaultCollisions::startGenerationThread | ( | unsigned int | num_trials, |
| double | min_frac, | ||
| bool | verbose = true |
||
| ) |

Member Data Documentation
◆ link_pairs_
|
protected |
main storage of link pair data
Definition at line 97 of file default_collisions.hpp.
◆ progress_
|
protected |
Definition at line 101 of file default_collisions.hpp.
◆ worker_
|
protected |
Definition at line 100 of file default_collisions.hpp.
The documentation for this class was generated from the following files:
- moveit_setup_assistant/moveit_setup_srdf_plugins/include/moveit_setup_srdf_plugins/default_collisions.hpp
- moveit_setup_assistant/moveit_setup_srdf_plugins/src/default_collisions.cpp