#include <pilz_industrial_motion_planner/joint_limits_container.h>#include <pilz_industrial_motion_planner/joint_limits_extension.h>
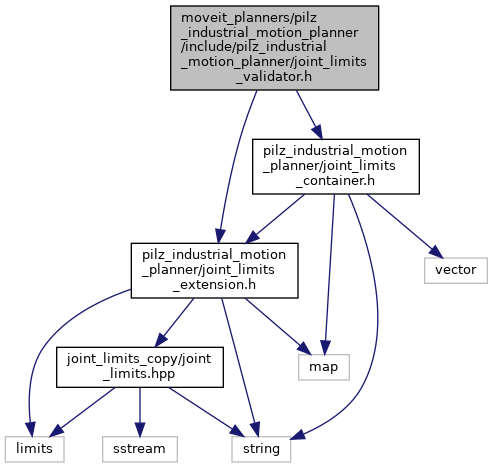
Include dependency graph for joint_limits_validator.h:
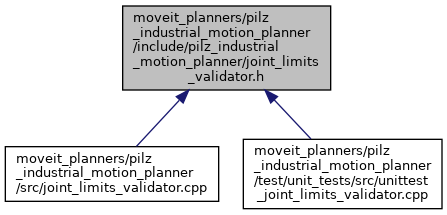
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pilz_industrial_motion_planner::JointLimitsValidator |
| Validates the equality of all limits inside a container. More... | |
| class | pilz_industrial_motion_planner::ValidationException |
| A base class for all validations exceptions inheriting from std::runtime_exception. More... | |
| class | pilz_industrial_motion_planner::ValidationJointMissingException |
| Thrown the limits for a joint are defined in the urdf but not in the node parameters (loaded from yaml) More... | |
| class | pilz_industrial_motion_planner::ValidationDifferentLimitsException |
| Thrown when the limits differ. More... | |
| class | pilz_industrial_motion_planner::ValidationBoundsViolationException |
| Thrown when the limits from the param server are weaker than the ones obtained from the urdf. More... | |
Namespaces | |
| pilz_industrial_motion_planner | |