Classes | |
| struct | JointLimits |
| Extends joint_limits_interface::JointLimits with a deceleration parameter. More... | |
Functions | |
| bool | declareParameters (const std::string &joint_name, const std::string ¶m_ns, const rclcpp::Node::SharedPtr &node) |
| bool | getJointLimits (const std::string &joint_name, const std::string ¶m_ns, const rclcpp::Node::SharedPtr &node, joint_limits_interface::JointLimits &limits) |
Function Documentation
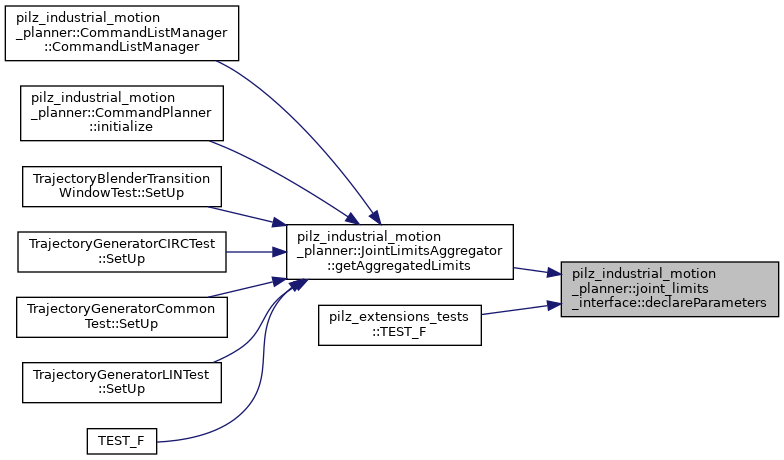
◆ declareParameters()
|
inline |
- See also
- joint_limits::declare_parameters(...)
Definition at line 49 of file joint_limits_interface_extension.h.
Here is the call graph for this function:

Here is the caller graph for this function:
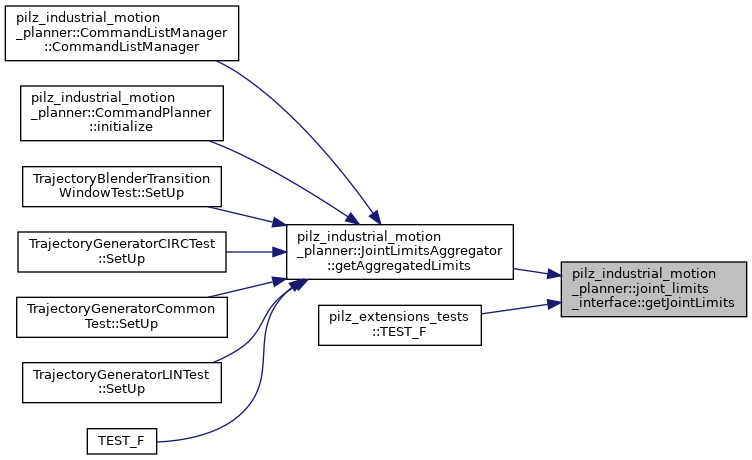
◆ getJointLimits()
|
inline |
- See also
- joint_limits::get_joint_limits(...)
Definition at line 57 of file joint_limits_interface_extension.h.
Here is the call graph for this function:

Here is the caller graph for this function: