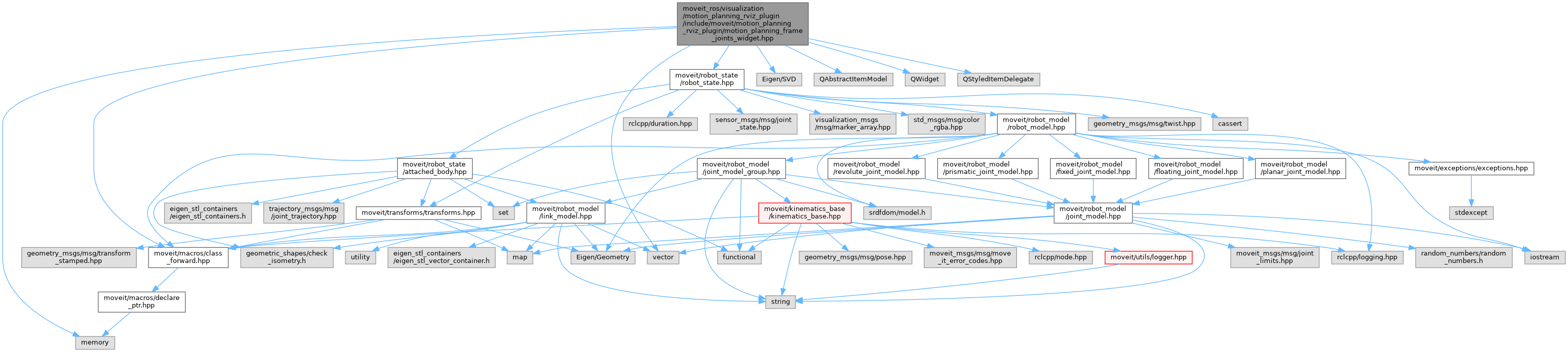
#include <moveit/macros/class_forward.hpp>#include <moveit/robot_state/robot_state.hpp>#include <Eigen/SVD>#include <QAbstractItemModel>#include <QWidget>#include <QStyledItemDelegate>#include <vector>#include <memory>
Include dependency graph for motion_planning_frame_joints_widget.hpp:
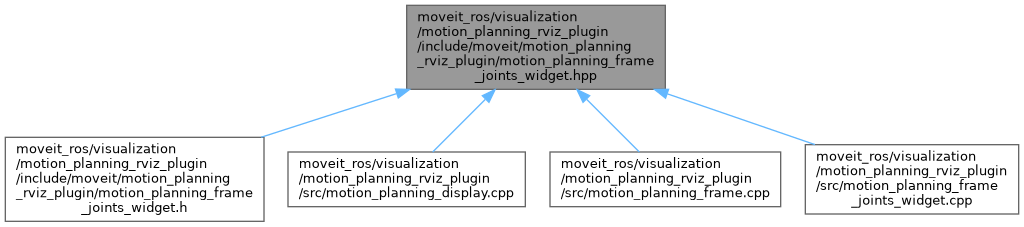
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | moveit_rviz_plugin::JMGItemModel |
| class | moveit_rviz_plugin::JointsWidgetEventFilter |
| class | moveit_rviz_plugin::MotionPlanningFrameJointsWidget |
| class | moveit_rviz_plugin::ProgressBarDelegate |
| Delegate to show the joint value as with a progress bar indicator between min and max. More... | |
| class | moveit_rviz_plugin::ProgressBarEditor |
| Number editor via progress bar dragging. More... | |
| class | moveit_rviz_plugin::JogSlider |
| Slider that jumps back to zero. More... | |
Namespaces | |
| namespace | Ui |
| namespace | robot_interaction |
| namespace | moveit_rviz_plugin |
Functions | |
| robot_interaction::MOVEIT_CLASS_FORWARD (InteractionHandler) | |