#include <interaction_handler.hpp>
Public Member Functions | |
| InteractionHandler (const RobotInteractionPtr &robot_interaction, const std::string &name, const moveit::core::RobotState &initial_robot_state, const std::shared_ptr< tf2_ros::Buffer > &tf_buffer=std::shared_ptr< tf2_ros::Buffer >()) | |
| InteractionHandler (const RobotInteractionPtr &robot_interaction, const std::string &name, const std::shared_ptr< tf2_ros::Buffer > &tf_buffer=std::shared_ptr< tf2_ros::Buffer >()) | |
| InteractionHandler (const std::string &name, const moveit::core::RobotState &initial_robot_state, const std::shared_ptr< tf2_ros::Buffer > &tf_buffer=std::shared_ptr< tf2_ros::Buffer >()) | |
| InteractionHandler (const std::string &name, const moveit::core::RobotModelConstPtr &model, const std::shared_ptr< tf2_ros::Buffer > &tf_buffer=std::shared_ptr< tf2_ros::Buffer >()) | |
| ~InteractionHandler () override | |
| const std::string & | getName () const |
| void | setUpdateCallback (const InteractionHandlerCallbackFn &callback) |
| const InteractionHandlerCallbackFn & | getUpdateCallback () const |
| void | setMeshesVisible (bool visible) |
| bool | getMeshesVisible () const |
| void | setControlsVisible (bool visible) |
| bool | getControlsVisible () const |
| void | setPoseOffset (const EndEffectorInteraction &eef, const geometry_msgs::msg::Pose &m) |
| Set the offset from EEF to its marker. | |
| void | setPoseOffset (const JointInteraction &j, const geometry_msgs::msg::Pose &m) |
| Set the offset from a joint to its marker. | |
| bool | getPoseOffset (const EndEffectorInteraction &eef, geometry_msgs::msg::Pose &m) |
| Get the offset from EEF to its marker. | |
| bool | getPoseOffset (const JointInteraction &vj, geometry_msgs::msg::Pose &m) |
| Get the offset from a joint to its marker. | |
| void | clearPoseOffset (const EndEffectorInteraction &eef) |
| Clear the interactive marker pose offset for the given end-effector. | |
| void | clearPoseOffset (const JointInteraction &vj) |
| Clear the interactive marker pose offset for the given joint. | |
| void | clearPoseOffsets () |
| Clear the pose offset for all end-effectors and virtual joints. | |
| void | setMenuHandler (const std::shared_ptr< interactive_markers::MenuHandler > &mh) |
| Set the menu handler that defines menus and callbacks for all interactive markers drawn by this interaction handler. | |
| const std::shared_ptr< interactive_markers::MenuHandler > & | getMenuHandler () |
| Get the menu handler that defines menus and callbacks for all interactive markers drawn by this interaction handler. | |
| void | clearMenuHandler () |
| Remove the menu handler for this interaction handler. | |
| bool | getLastEndEffectorMarkerPose (const EndEffectorInteraction &eef, geometry_msgs::msg::PoseStamped &pose) |
| Get the last interactive_marker command pose for an end-effector. | |
| bool | getLastJointMarkerPose (const JointInteraction &vj, geometry_msgs::msg::PoseStamped &pose) |
| Get the last interactive_marker command pose for a joint. | |
| void | clearLastEndEffectorMarkerPose (const EndEffectorInteraction &eef) |
| Clear the last interactive_marker command pose for the given end-effector. | |
| void | clearLastJointMarkerPose (const JointInteraction &vj) |
| Clear the last interactive_marker command pose for the given joint. | |
| void | clearLastMarkerPoses () |
| Clear the last interactive_marker command poses for all end-effectors and joints. | |
| virtual void | handleEndEffector (const EndEffectorInteraction &eef, const visualization_msgs::msg::InteractiveMarkerFeedback::ConstSharedPtr &feedback) |
| Update the internal state maintained by the handler using information from the received feedback message. | |
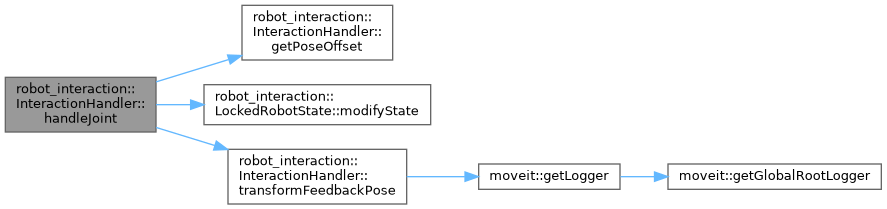
| virtual void | handleJoint (const JointInteraction &vj, const visualization_msgs::msg::InteractiveMarkerFeedback::ConstSharedPtr &feedback) |
| Update the internal state maintained by the handler using information from the received feedback message. | |
| virtual void | handleGeneric (const GenericInteraction &g, const visualization_msgs::msg::InteractiveMarkerFeedback::ConstSharedPtr &feedback) |
| Update the internal state maintained by the handler using information from the received feedback message. | |
| virtual bool | inError (const EndEffectorInteraction &eef) const |
| Check if the marker corresponding to this end-effector leads to an invalid state. | |
| virtual bool | inError (const JointInteraction &vj) const |
| Check if the marker corresponding to this joint leads to an invalid state. | |
| virtual bool | inError (const GenericInteraction &g) const |
| Check if the generic marker to an invalid state. | |
| void | clearError () |
| Clear any error settings. This makes the markers appear as if the state is no longer invalid. | |
| moveit::core::RobotStateConstPtr | getState () const |
| Get a copy of the RobotState maintained by this InteractionHandler. | |
| void | setState (const moveit::core::RobotState &state) |
| Set a new RobotState for this InteractionHandler. | |
 Public Member Functions inherited from robot_interaction::LockedRobotState Public Member Functions inherited from robot_interaction::LockedRobotState | |
| LockedRobotState (const moveit::core::RobotState &state) | |
| LockedRobotState (const moveit::core::RobotModelPtr &model) | |
| virtual | ~LockedRobotState () |
| moveit::core::RobotStateConstPtr | getState () const |
| get read-only access to the state. | |
| void | setState (const moveit::core::RobotState &state) |
| Set the state to the new value. | |
| void | modifyState (const ModifyStateFunction &modify) |
Protected Member Functions | |
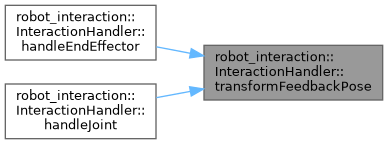
| bool | transformFeedbackPose (const visualization_msgs::msg::InteractiveMarkerFeedback::ConstSharedPtr &feedback, const geometry_msgs::msg::Pose &offset, geometry_msgs::msg::PoseStamped &tpose) |
| Protected Member Functions inherited from robot_interaction::LockedRobotState | |
| virtual void | robotStateChanged () |
Protected Attributes | |
| const std::string | name_ |
| const std::string | planning_frame_ |
| std::shared_ptr< tf2_ros::Buffer > | tf_buffer_ |
| Protected Attributes inherited from robot_interaction::LockedRobotState | |
| std::mutex | state_lock_ |
Additional Inherited Members | |
| Public Types inherited from robot_interaction::LockedRobotState | |
| typedef std::function< void(moveit::core::RobotState *)> | ModifyStateFunction |
Detailed Description
Manage interactive markers to control a RobotState.
Each instance maintains one or more interactive markers to control various joints in one group of one RobotState. The group being controlled is maintained by the RobotInteraction object that contains this InteractionHandler object. All InteractionHandler objects in the same RobotInteraction are controlling the same group.
Definition at line 82 of file interaction_handler.hpp.
Constructor & Destructor Documentation
◆ InteractionHandler() [1/4]
| robot_interaction::InteractionHandler::InteractionHandler | ( | const RobotInteractionPtr & | robot_interaction, |
| const std::string & | name, | ||
| const moveit::core::RobotState & | initial_robot_state, | ||
| const std::shared_ptr< tf2_ros::Buffer > & | tf_buffer = std::shared_ptr<tf2_ros::Buffer>() |
||
| ) |
Definition at line 64 of file interaction_handler.cpp.
◆ InteractionHandler() [2/4]
| robot_interaction::InteractionHandler::InteractionHandler | ( | const RobotInteractionPtr & | robot_interaction, |
| const std::string & | name, | ||
| const std::shared_ptr< tf2_ros::Buffer > & | tf_buffer = std::shared_ptr<tf2_ros::Buffer>() |
||
| ) |
Definition at line 77 of file interaction_handler.cpp.
◆ InteractionHandler() [3/4]
| robot_interaction::InteractionHandler::InteractionHandler | ( | const std::string & | name, |
| const moveit::core::RobotState & | initial_robot_state, | ||
| const std::shared_ptr< tf2_ros::Buffer > & | tf_buffer = std::shared_ptr< tf2_ros::Buffer >() |
||
| ) |
◆ InteractionHandler() [4/4]
| robot_interaction::InteractionHandler::InteractionHandler | ( | const std::string & | name, |
| const moveit::core::RobotModelConstPtr & | model, | ||
| const std::shared_ptr< tf2_ros::Buffer > & | tf_buffer = std::shared_ptr< tf2_ros::Buffer >() |
||
| ) |
◆ ~InteractionHandler()
|
inlineoverride |
Definition at line 101 of file interaction_handler.hpp.
Member Function Documentation
◆ clearError()
| void robot_interaction::InteractionHandler::clearError | ( | ) |
Clear any error settings. This makes the markers appear as if the state is no longer invalid.
Definition at line 358 of file interaction_handler.cpp.
◆ clearLastEndEffectorMarkerPose()
| void robot_interaction::InteractionHandler::clearLastEndEffectorMarkerPose | ( | const EndEffectorInteraction & | eef | ) |
Clear the last interactive_marker command pose for the given end-effector.
- Parameters
-
The target end-effector.
Definition at line 174 of file interaction_handler.cpp.
◆ clearLastJointMarkerPose()
| void robot_interaction::InteractionHandler::clearLastJointMarkerPose | ( | const JointInteraction & | vj | ) |
Clear the last interactive_marker command pose for the given joint.
- Parameters
-
The target joint.
Definition at line 180 of file interaction_handler.cpp.
◆ clearLastMarkerPoses()
| void robot_interaction::InteractionHandler::clearLastMarkerPoses | ( | ) |
Clear the last interactive_marker command poses for all end-effectors and joints.
Definition at line 186 of file interaction_handler.cpp.
◆ clearMenuHandler()
| void robot_interaction::InteractionHandler::clearMenuHandler | ( | ) |
Remove the menu handler for this interaction handler.
Definition at line 204 of file interaction_handler.cpp.
◆ clearPoseOffset() [1/2]
| void robot_interaction::InteractionHandler::clearPoseOffset | ( | const EndEffectorInteraction & | eef | ) |
Clear the interactive marker pose offset for the given end-effector.
- Parameters
-
The target end-effector.
Definition at line 107 of file interaction_handler.cpp.
◆ clearPoseOffset() [2/2]
| void robot_interaction::InteractionHandler::clearPoseOffset | ( | const JointInteraction & | vj | ) |
Clear the interactive marker pose offset for the given joint.
- Parameters
-
The target joint.
Definition at line 113 of file interaction_handler.cpp.
◆ clearPoseOffsets()
| void robot_interaction::InteractionHandler::clearPoseOffsets | ( | ) |
Clear the pose offset for all end-effectors and virtual joints.
Definition at line 119 of file interaction_handler.cpp.
◆ getControlsVisible()
| bool robot_interaction::InteractionHandler::getControlsVisible | ( | ) | const |
Definition at line 461 of file interaction_handler.cpp.
◆ getLastEndEffectorMarkerPose()
| bool robot_interaction::InteractionHandler::getLastEndEffectorMarkerPose | ( | const EndEffectorInteraction & | eef, |
| geometry_msgs::msg::PoseStamped & | pose | ||
| ) |
Get the last interactive_marker command pose for an end-effector.
- Parameters
-
The end-effector in question. A PoseStamped message containing the last (offset-removed) pose commanded for the end-effector.
- Returns
- True if a pose for that end-effector was found, false otherwise.
Definition at line 149 of file interaction_handler.cpp.
◆ getLastJointMarkerPose()
| bool robot_interaction::InteractionHandler::getLastJointMarkerPose | ( | const JointInteraction & | vj, |
| geometry_msgs::msg::PoseStamped & | pose | ||
| ) |
Get the last interactive_marker command pose for a joint.
- Parameters
-
The joint in question. A PoseStamped message containing the last (offset-removed) pose commanded for the joint.
- Returns
- True if a pose for that joint was found, false otherwise.
Definition at line 162 of file interaction_handler.cpp.
◆ getMenuHandler()
| const std::shared_ptr< interactive_markers::MenuHandler > & robot_interaction::InteractionHandler::getMenuHandler | ( | ) |
Get the menu handler that defines menus and callbacks for all interactive markers drawn by this interaction handler.
- Returns
- The menu handler.
Definition at line 198 of file interaction_handler.cpp.
◆ getMeshesVisible()
| bool robot_interaction::InteractionHandler::getMeshesVisible | ( | ) | const |
Definition at line 449 of file interaction_handler.cpp.
◆ getName()
|
inline |
Definition at line 105 of file interaction_handler.hpp.
◆ getPoseOffset() [1/2]
| bool robot_interaction::InteractionHandler::getPoseOffset | ( | const EndEffectorInteraction & | eef, |
| geometry_msgs::msg::Pose & | m | ||
| ) |
Get the offset from EEF to its marker.
- Parameters
-
The target end-effector. The pose offset (only valid if return value is true).
- Returns
- True if an offset was found for the given end-effector.
Definition at line 125 of file interaction_handler.cpp.
◆ getPoseOffset() [2/2]
| bool robot_interaction::InteractionHandler::getPoseOffset | ( | const JointInteraction & | vj, |
| geometry_msgs::msg::Pose & | m | ||
| ) |
Get the offset from a joint to its marker.
- Parameters
-
vj The joint. m The pose offset (only valid if return value is true).
- Returns
- True if an offset was found for the given joint.
Definition at line 137 of file interaction_handler.cpp.
◆ getState()
| moveit::core::RobotStateConstPtr robot_interaction::LockedRobotState::getState | ( | ) | const |
Get a copy of the RobotState maintained by this InteractionHandler.
Definition at line 76 of file locked_robot_state.cpp.
◆ getUpdateCallback()
| const InteractionHandlerCallbackFn & robot_interaction::InteractionHandler::getUpdateCallback | ( | ) | const |
Definition at line 437 of file interaction_handler.cpp.
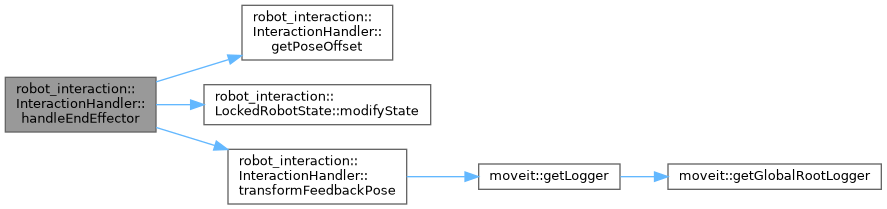
◆ handleEndEffector()
|
virtual |
Update the internal state maintained by the handler using information from the received feedback message.
Definition at line 227 of file interaction_handler.cpp.
◆ handleGeneric()
|
virtual |
Update the internal state maintained by the handler using information from the received feedback message.
Definition at line 210 of file interaction_handler.cpp.

◆ handleJoint()
|
virtual |
Update the internal state maintained by the handler using information from the received feedback message.
Definition at line 260 of file interaction_handler.cpp.
◆ inError() [1/3]
|
virtual |
Check if the marker corresponding to this end-effector leads to an invalid state.
Definition at line 343 of file interaction_handler.cpp.
◆ inError() [2/3]
|
virtual |
Check if the generic marker to an invalid state.
Definition at line 348 of file interaction_handler.cpp.
◆ inError() [3/3]
|
virtual |
Check if the marker corresponding to this joint leads to an invalid state.
Definition at line 353 of file interaction_handler.cpp.
◆ setControlsVisible()
| void robot_interaction::InteractionHandler::setControlsVisible | ( | bool | visible | ) |
Definition at line 455 of file interaction_handler.cpp.
◆ setMenuHandler()
| void robot_interaction::InteractionHandler::setMenuHandler | ( | const std::shared_ptr< interactive_markers::MenuHandler > & | mh | ) |
Set the menu handler that defines menus and callbacks for all interactive markers drawn by this interaction handler.
- Parameters
-
A menu handler.
Definition at line 192 of file interaction_handler.cpp.
◆ setMeshesVisible()
| void robot_interaction::InteractionHandler::setMeshesVisible | ( | bool | visible | ) |
Definition at line 443 of file interaction_handler.cpp.
◆ setPoseOffset() [1/2]
| void robot_interaction::InteractionHandler::setPoseOffset | ( | const EndEffectorInteraction & | eef, |
| const geometry_msgs::msg::Pose & | m | ||
| ) |
Set the offset from EEF to its marker.
- Parameters
-
eef The target end-effector. m The pose of the marker in the frame of the end-effector parent.
Definition at line 95 of file interaction_handler.cpp.
◆ setPoseOffset() [2/2]
| void robot_interaction::InteractionHandler::setPoseOffset | ( | const JointInteraction & | j, |
| const geometry_msgs::msg::Pose & | m | ||
| ) |
Set the offset from a joint to its marker.
- Parameters
-
j The target joint. m The pose of the marker in the frame of the joint parent.
Definition at line 101 of file interaction_handler.cpp.
◆ setState()
| void robot_interaction::LockedRobotState::setState | ( | const moveit::core::RobotState & | state | ) |
Set a new RobotState for this InteractionHandler.
Definition at line 79 of file locked_robot_state.cpp.
◆ setUpdateCallback()
| void robot_interaction::InteractionHandler::setUpdateCallback | ( | const InteractionHandlerCallbackFn & | callback | ) |
Definition at line 431 of file interaction_handler.cpp.
◆ transformFeedbackPose()
|
protected |
Definition at line 391 of file interaction_handler.cpp.

Member Data Documentation
◆ name_
|
protected |
Definition at line 231 of file interaction_handler.hpp.
◆ planning_frame_
|
protected |
Definition at line 232 of file interaction_handler.hpp.
◆ tf_buffer_
|
protected |
Definition at line 233 of file interaction_handler.hpp.
The documentation for this class was generated from the following files:
- moveit_ros/robot_interaction/include/moveit/robot_interaction/interaction_handler.hpp
- moveit_ros/robot_interaction/src/interaction_handler.cpp