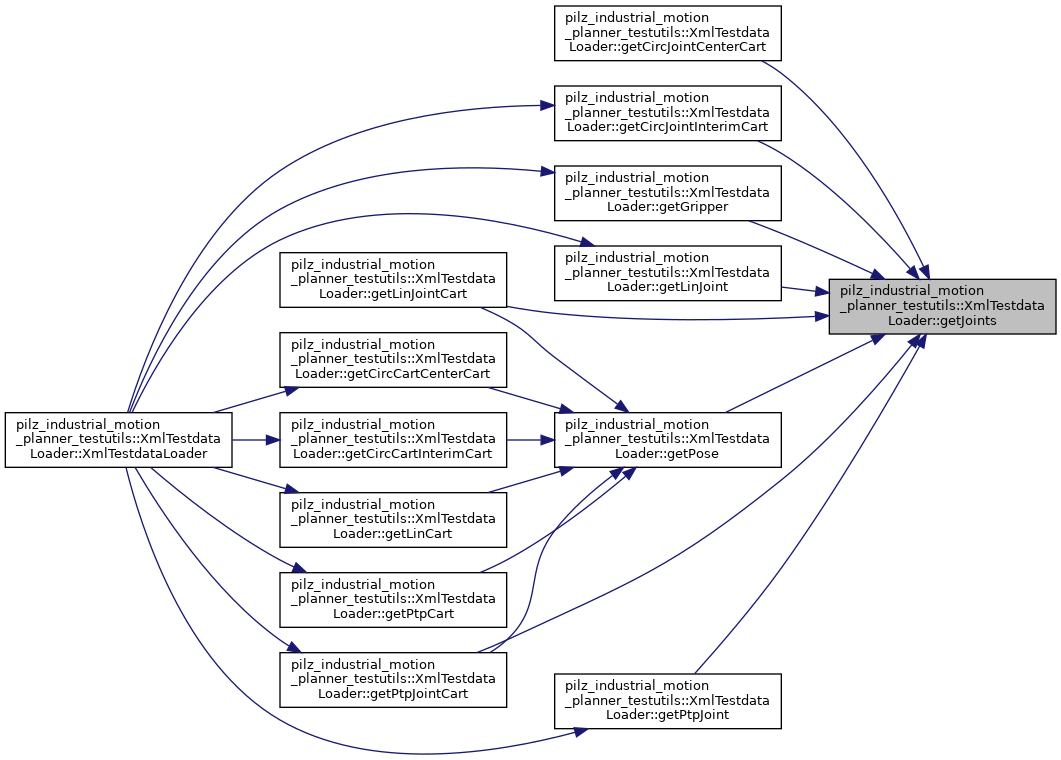
Implements a test data loader which uses a xml file to store the test data. More...
#include <xml_testdata_loader.h>
Classes | |
| class | AbstractCmdGetterAdapter |
| Abstract base class providing a GENERIC getter-function signature which can be used to load DIFFERENT command types (like Ptp, Lin, etc.) from the test data file. More... | |
Public Member Functions | |
| XmlTestdataLoader (const std::string &path_filename) | |
| XmlTestdataLoader (const std::string &path_filename, const moveit::core::RobotModelConstPtr &robot_model) | |
| ~XmlTestdataLoader () override | |
| JointConfiguration | getJoints (const std::string &pos_name, const std::string &group_name) const override |
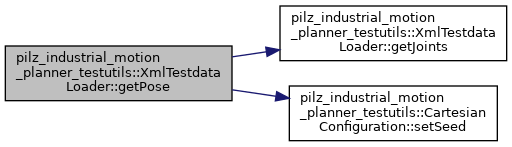
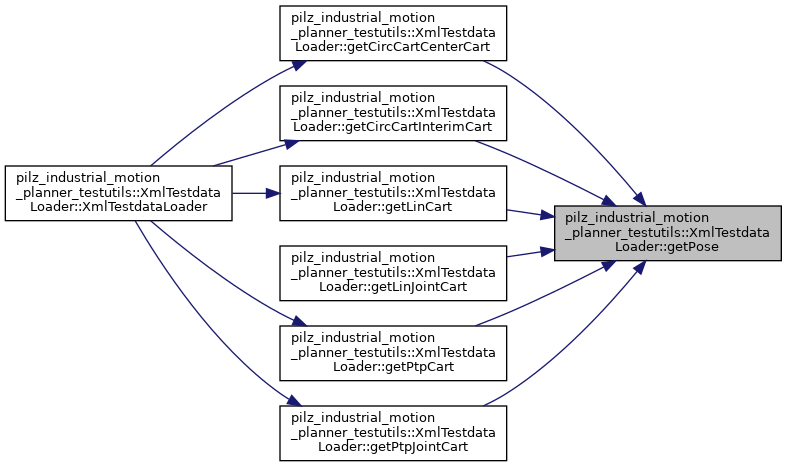
| CartesianConfiguration | getPose (const std::string &pos_name, const std::string &group_name) const override |
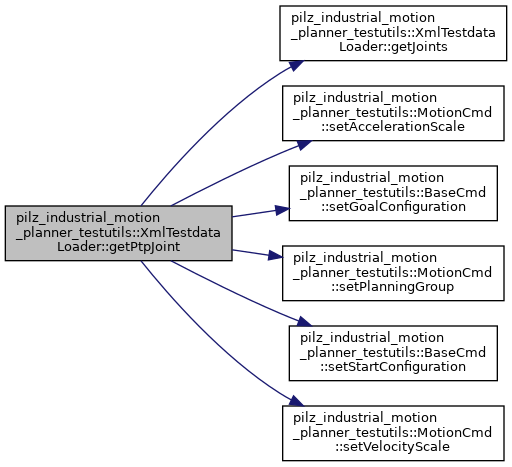
| PtpJoint | getPtpJoint (const std::string &cmd_name) const override |
| Returns the command with the specified name from the test data. More... | |
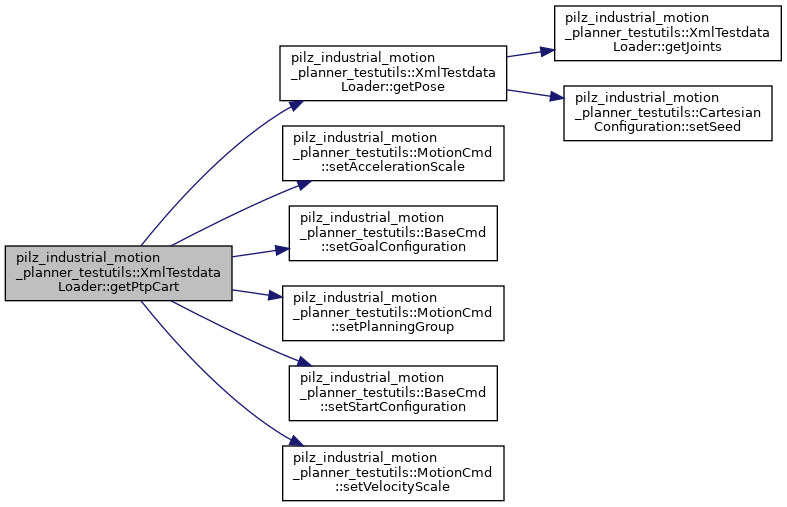
| PtpCart | getPtpCart (const std::string &cmd_name) const override |
| PtpJointCart | getPtpJointCart (const std::string &cmd_name) const override |
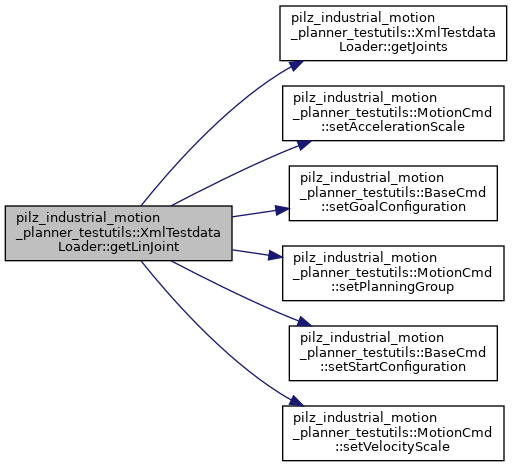
| LinJoint | getLinJoint (const std::string &cmd_name) const override |
| Returns the command with the specified name from the test data. More... | |
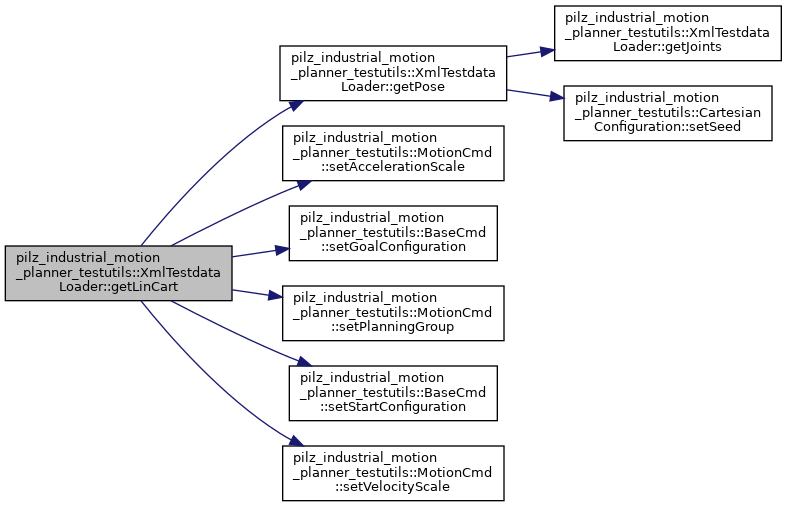
| LinCart | getLinCart (const std::string &cmd_name) const override |
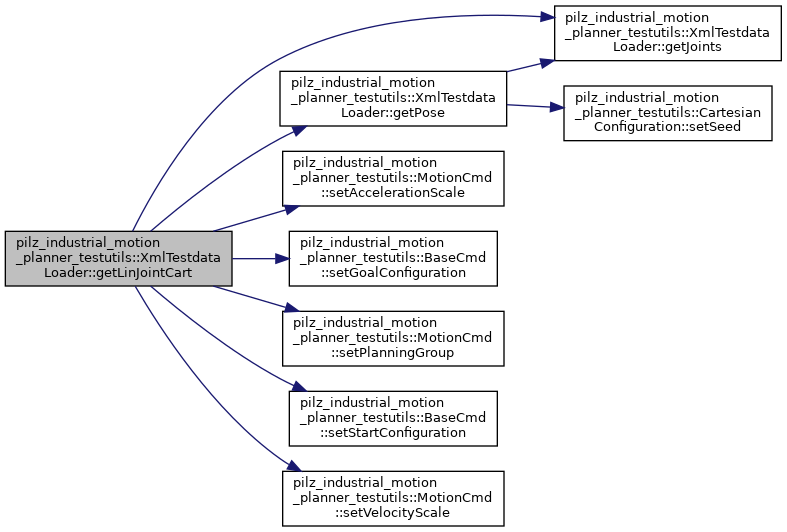
| LinJointCart | getLinJointCart (const std::string &cmd_name) const override |
| CircCenterCart | getCircCartCenterCart (const std::string &cmd_name) const override |
| Returns the command with the specified name from the test data. More... | |
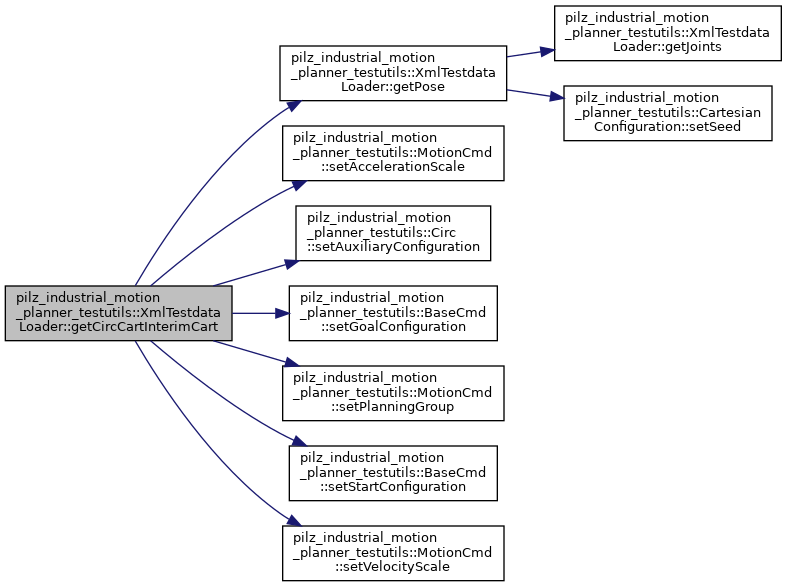
| CircInterimCart | getCircCartInterimCart (const std::string &cmd_name) const override |
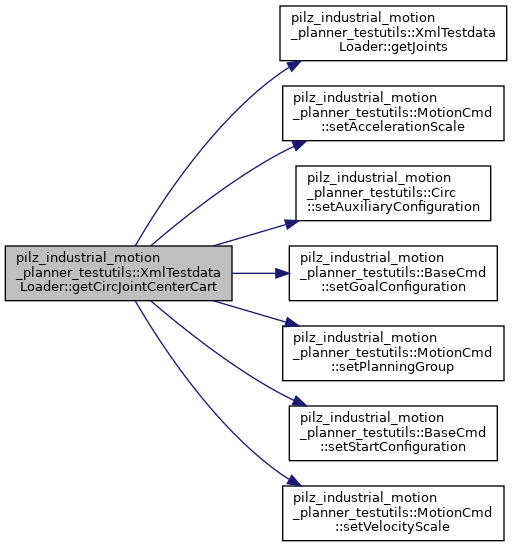
| CircJointCenterCart | getCircJointCenterCart (const std::string &cmd_name) const override |
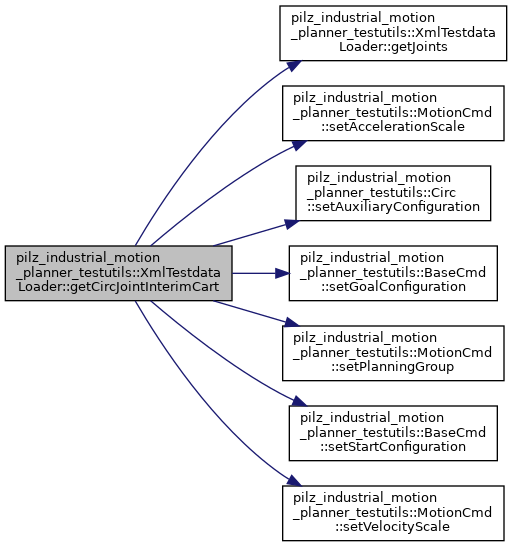
| CircJointInterimCart | getCircJointInterimCart (const std::string &cmd_name) const override |
| Sequence | getSequence (const std::string &cmd_name) const override |
| Returns the command with the specified name from the test data. More... | |
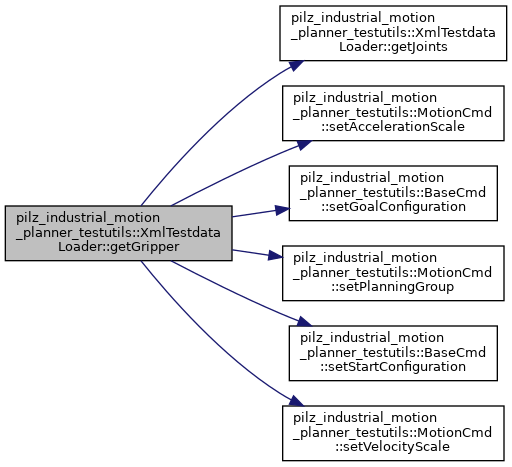
| Gripper | getGripper (const std::string &cmd_name) const override |
| Returns the command with the specified name from the test data. More... | |
 Public Member Functions inherited from pilz_industrial_motion_planner_testutils::TestdataLoader Public Member Functions inherited from pilz_industrial_motion_planner_testutils::TestdataLoader | |
| TestdataLoader ()=default | |
| TestdataLoader (moveit::core::RobotModelConstPtr robot_model) | |
| TestdataLoader (const TestdataLoader &)=default | |
| TestdataLoader (TestdataLoader &&)=default | |
| TestdataLoader & | operator= (const TestdataLoader &)=default |
| TestdataLoader & | operator= (TestdataLoader &&)=default |
| virtual | ~TestdataLoader ()=default |
| void | setRobotModel (moveit::core::RobotModelConstPtr robot_model) |
Additional Inherited Members | |
| Protected Attributes inherited from pilz_industrial_motion_planner_testutils::TestdataLoader | |
| moveit::core::RobotModelConstPtr | robot_model_ |
Detailed Description
Implements a test data loader which uses a xml file to store the test data.
The Xml-file has the following structure:
<testdata>
<poses> <pos name="MyTestPos1"> <joints group_name="manipulator">j1 j2 j3 j4 j5 j6</joints> <xyzQuat group_name="manipulator" link_name="prbt_tcp"> x y z wx wy wz w <seed><joints group_name="manipulator">s1 s2 s3 s4 s5 s6</joints></seed> </xyzQuat> <joints group_name="gripper">j_gripper</joints> </pos>
<pos name="MyTestPos2"> <joints group_name="manipulator">j1 j2 j3 j4 j5 j6</joints> <xyzQuat group_name="manipulator" link_name="prbt_tcp">x y z wx wy wz w</xyzQuat> <joints group_name="gripper">j_gripper</joints> </pos> </poses>
<ptps> <ptp name="MyPtp1"> <startPos>MyTestPos1</startPos> <endPos>MyTestPos2</endPos> <vel>0.1</vel> <acc>0.2</acc> </ptp> </ptps>
<lins> <lin name="MyTestLin1"> <planningGroup>manipulator</planningGroup> <targetLink>prbt_tcp</targetLink> <startPos>MyTestPos1</startPos> <endPos>MyTestPos2</endPos> <vel>0.3</vel> <acc>0.4</acc> </lin> </lins>
<circs> <circ name="MyTestCirc1"> <planningGroup>manipulator</planningGroup> <targetLink>prbt_tcp</targetLink> <startPos>MyTestPos1</startPos> <intermediatePos>MyTestPos1</intermediatePos> <centerPos>MyTestPos2</centerPos> <endPos>MyTestPos1</endPos> <vel>0.2</vel> <acc>0.5</acc> </circ> </circs>
<sequences> <blend name="TestBlend"> <sequenceCmd name="TestPtp" type="ptp" blend_radius="0.2" > <sequenceCmd name="MyTestLin1" type="lin" blend_radius="0.01" > <sequenceCmd name="MyTestCirc1" type="circ" blend_radius="0" > </blend> </sequences>
</testdata>
Definition at line 119 of file xml_testdata_loader.h.
Constructor & Destructor Documentation
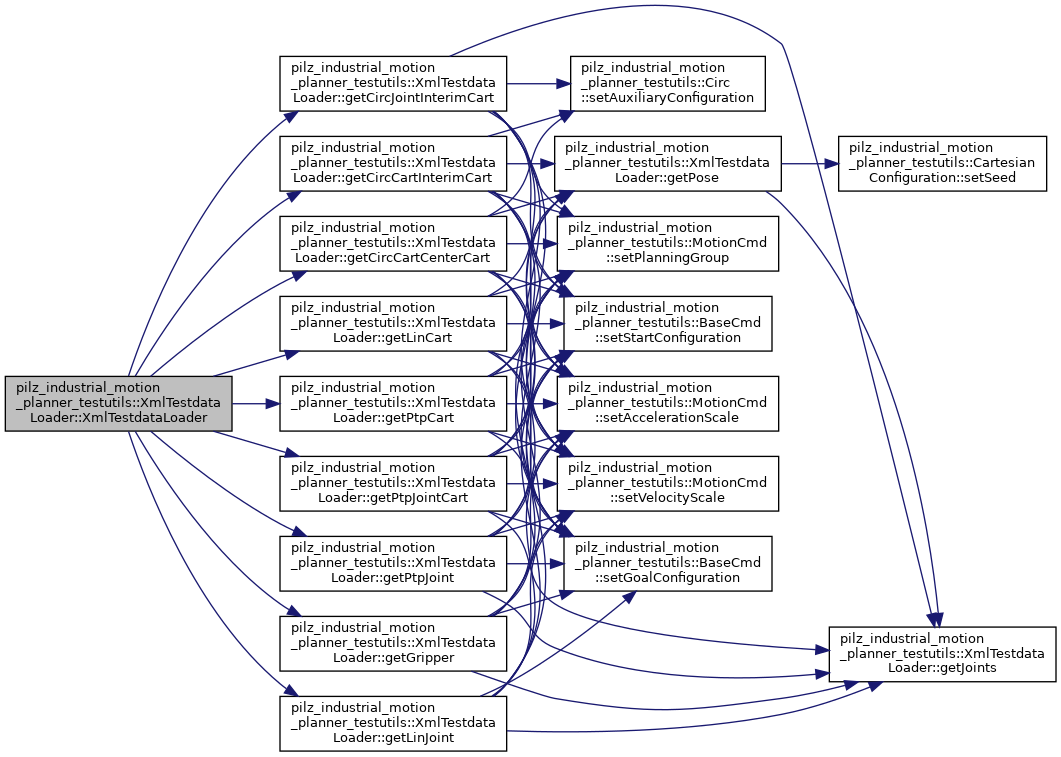
◆ XmlTestdataLoader() [1/2]
| pilz_industrial_motion_planner_testutils::XmlTestdataLoader::XmlTestdataLoader | ( | const std::string & | path_filename | ) |
◆ XmlTestdataLoader() [2/2]
| pilz_industrial_motion_planner_testutils::XmlTestdataLoader::XmlTestdataLoader | ( | const std::string & | path_filename, |
| const moveit::core::RobotModelConstPtr & | robot_model | ||
| ) |

◆ ~XmlTestdataLoader()
|
override |
Definition at line 173 of file xml_testdata_loader.cpp.
Member Function Documentation
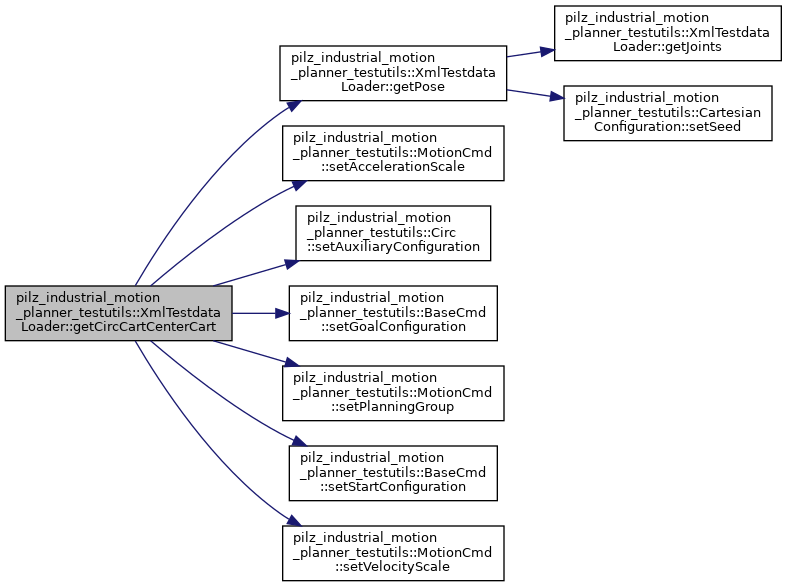
◆ getCircCartCenterCart()
|
overridevirtual |
Returns the command with the specified name from the test data.
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 427 of file xml_testdata_loader.cpp.

◆ getCircCartInterimCart()
|
overridevirtual |
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 444 of file xml_testdata_loader.cpp.

◆ getCircJointCenterCart()
|
overridevirtual |
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 478 of file xml_testdata_loader.cpp.
◆ getCircJointInterimCart()
|
overridevirtual |
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 461 of file xml_testdata_loader.cpp.

◆ getGripper()
|
overridevirtual |
Returns the command with the specified name from the test data.
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 536 of file xml_testdata_loader.cpp.

◆ getJoints()
|
overridevirtual |
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 222 of file xml_testdata_loader.cpp.
◆ getLinCart()
|
overridevirtual |
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 344 of file xml_testdata_loader.cpp.

◆ getLinJoint()
|
overridevirtual |
Returns the command with the specified name from the test data.
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 328 of file xml_testdata_loader.cpp.

◆ getLinJointCart()
|
overridevirtual |
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 360 of file xml_testdata_loader.cpp.
◆ getPose()
|
overridevirtual |
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 248 of file xml_testdata_loader.cpp.
◆ getPtpCart()
|
overridevirtual |
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 312 of file xml_testdata_loader.cpp.

◆ getPtpJoint()
|
overridevirtual |
Returns the command with the specified name from the test data.
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 280 of file xml_testdata_loader.cpp.

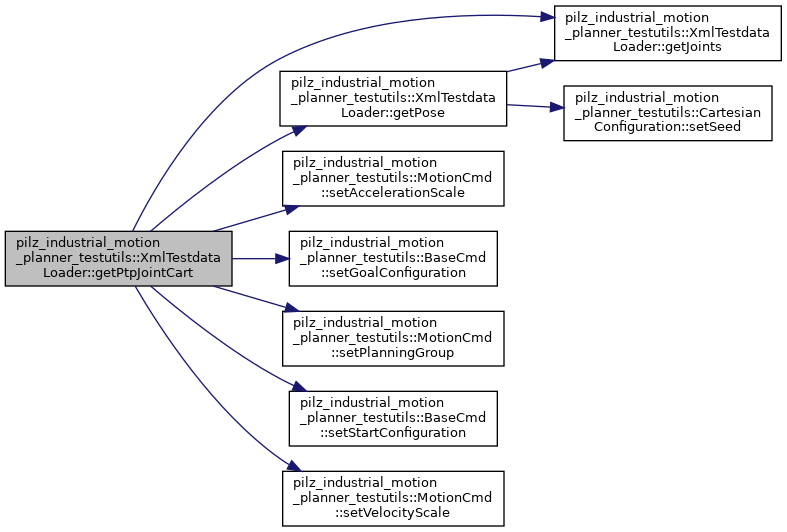
◆ getPtpJointCart()
|
overridevirtual |
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 296 of file xml_testdata_loader.cpp.

◆ getSequence()
|
overridevirtual |
Returns the command with the specified name from the test data.
Implements pilz_industrial_motion_planner_testutils::TestdataLoader.
Definition at line 495 of file xml_testdata_loader.cpp.

The documentation for this class was generated from the following files:
- moveit_planners/pilz_industrial_motion_planner_testutils/include/pilz_industrial_motion_planner_testutils/xml_testdata_loader.h
- moveit_planners/pilz_industrial_motion_planner_testutils/src/xml_testdata_loader.cpp