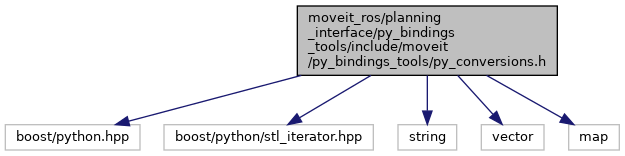
#include <boost/python.hpp>#include <boost/python/stl_iterator.hpp>#include <string>#include <vector>#include <map>
Include dependency graph for py_conversions.h:
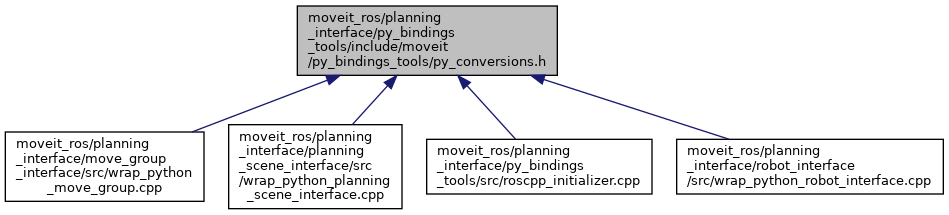
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| moveit | |
| Main namespace for MoveIt. | |
| moveit::py_bindings_tools | |
| Tools for creating python bindings for MoveIt. | |
Functions | |
| template<typename T > | |
| std::vector< T > | moveit::py_bindings_tools::typeFromList (const boost::python::object &values) |
| template<typename T > | |
| boost::python::list | moveit::py_bindings_tools::listFromType (const std::vector< T > &v) |
| template<typename T > | |
| boost::python::dict | moveit::py_bindings_tools::dictFromType (const std::map< std::string, T > &v) |
| std::vector< double > | moveit::py_bindings_tools::doubleFromList (const boost::python::object &values) |
| std::vector< std::string > | moveit::py_bindings_tools::stringFromList (const boost::python::object &values) |
| boost::python::list | moveit::py_bindings_tools::listFromDouble (const std::vector< double > &v) |
| boost::python::list | moveit::py_bindings_tools::listFromString (const std::vector< std::string > &v) |