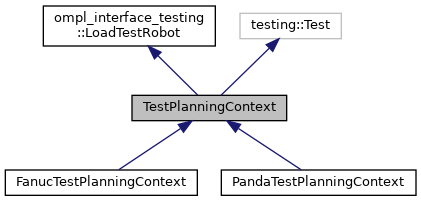
Generic implementation of the tests that can be executed on different robots. More...

Public Member Functions | |
| TestPlanningContext (const std::string &robot_name, const std::string &group_name) | |
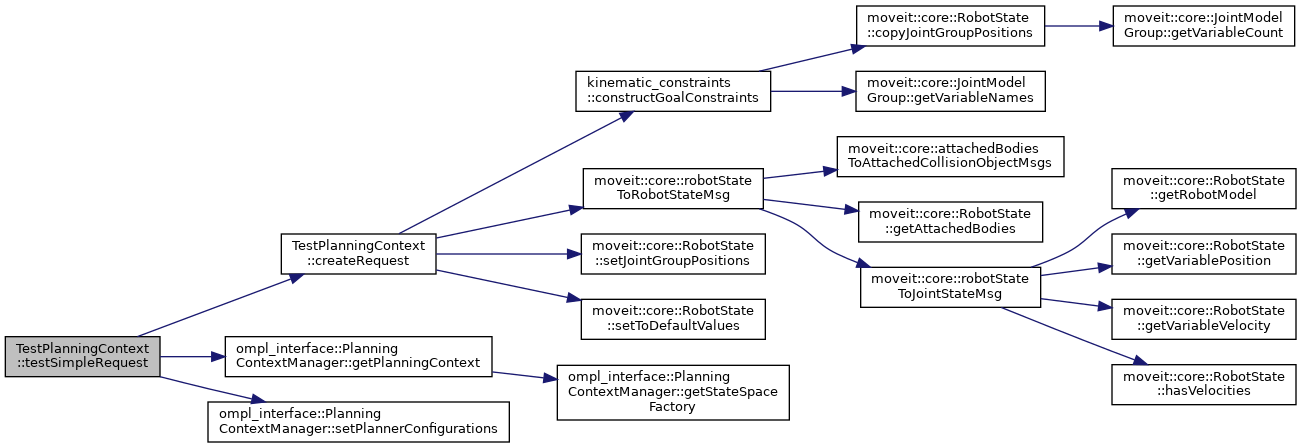
| void | testSimpleRequest (const std::vector< double > &start, const std::vector< double > &goal) |
| void | testPathConstraints (const std::vector< double > &start, const std::vector< double > &goal) |
Protected Member Functions | |
| void | SetUp () override |
| planning_interface::MotionPlanRequest | createRequest (const std::vector< double > &start, const std::vector< double > &goal) const |
| moveit_msgs::msg::PositionConstraint | createPositionConstraint (std::array< double, 3 > position, std::array< double, 3 > dimensions) |
| Helper function to create a position constraint. More... | |
| moveit_msgs::msg::OrientationConstraint | createOrientationConstraint (const geometry_msgs::msg::Quaternion &nominal_orientation) |
| Helper function to create a orientation constraint. More... | |
 Protected Member Functions inherited from ompl_interface_testing::LoadTestRobot Protected Member Functions inherited from ompl_interface_testing::LoadTestRobot | |
| LoadTestRobot (const std::string &robot_name, const std::string &group_name) | |
| Eigen::VectorXd | getRandomState () const |
| Eigen::VectorXd | getDeterministicState () const |
| Create a joint position vector with values 0.1, 0.2, 0.3, ... where the length depends on the number of joints in the robot. More... | |
Protected Attributes | |
| ompl_interface::ModelBasedStateSpacePtr | state_space_ |
| ompl_interface::ModelBasedPlanningContextSpecification | planning_context_spec_ |
| ompl_interface::ModelBasedPlanningContextPtr | planning_context_ |
| planning_scene::PlanningScenePtr | planning_scene_ |
| constraint_samplers::ConstraintSamplerManagerPtr | constraint_sampler_manager_ |
| rclcpp::Node::SharedPtr | node_ |
| Protected Attributes inherited from ompl_interface_testing::LoadTestRobot | |
| std::string | group_name_ |
| std::string | robot_name_ |
| moveit::core::RobotModelPtr | robot_model_ |
| moveit::core::RobotStatePtr | robot_state_ |
| const moveit::core::JointModelGroup * | joint_model_group_ |
| std::size_t | num_dofs_ |
| std::string | base_link_name_ |
| std::string | ee_link_name_ |
Detailed Description
Generic implementation of the tests that can be executed on different robots.
Test the creation of a ModelBasedPlanningContext through the PlanningContextManager.
The tests use a default robot state as start state, and then moves the last joint 0.1 radians/meters to create a joint goal. This creates an extremely simple planning problem to test general mechanics of the interface.
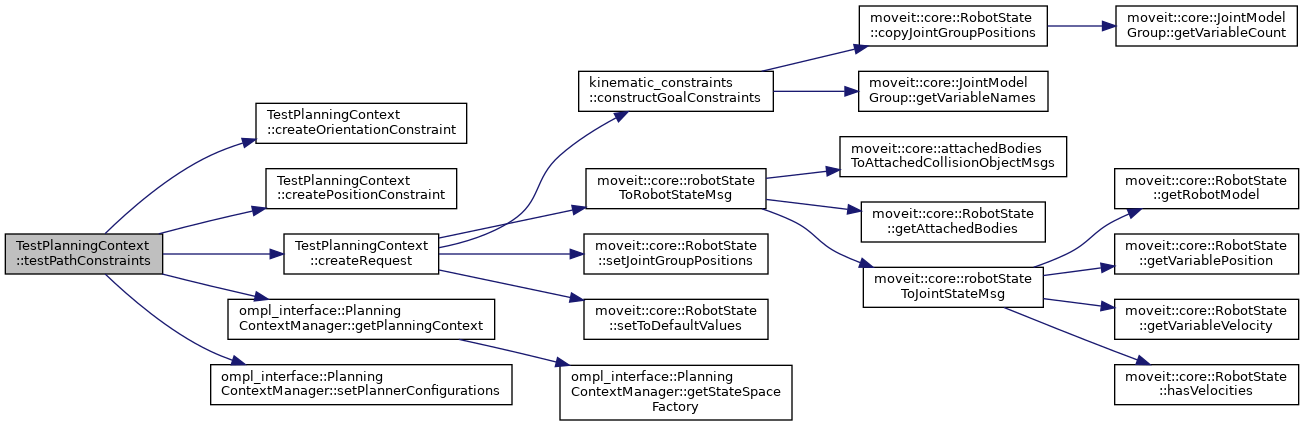
In the test with path constraints, we create an orientation constraint around the start orientation of the end-effector, with a tolerance on the rotation larger than the change in the last joint of the goal state. This makes sure the path constraints are easy to satisfy.
TODO(jeroendm) I also tried something similar with position constraints, but get a segmentation fault that occurs in the 'geometric_shapes' package, in the method 'useDimensions' in 'bodies.h'. git permalink: https://github.com/ros-planning/geometric_shapes/blob/df0478870b8592ce789ee1919f3124058c4327d7/include/geometric_shapes/bodies.h#L196
Definition at line 70 of file test_planning_context_manager.cpp.
Constructor & Destructor Documentation
◆ TestPlanningContext()
|
inline |
Definition at line 73 of file test_planning_context_manager.cpp.
Member Function Documentation
◆ createOrientationConstraint()
|
inlineprotected |
Helper function to create a orientation constraint.
Definition at line 272 of file test_planning_context_manager.cpp.

◆ createPositionConstraint()
|
inlineprotected |
Helper function to create a position constraint.
Definition at line 245 of file test_planning_context_manager.cpp.

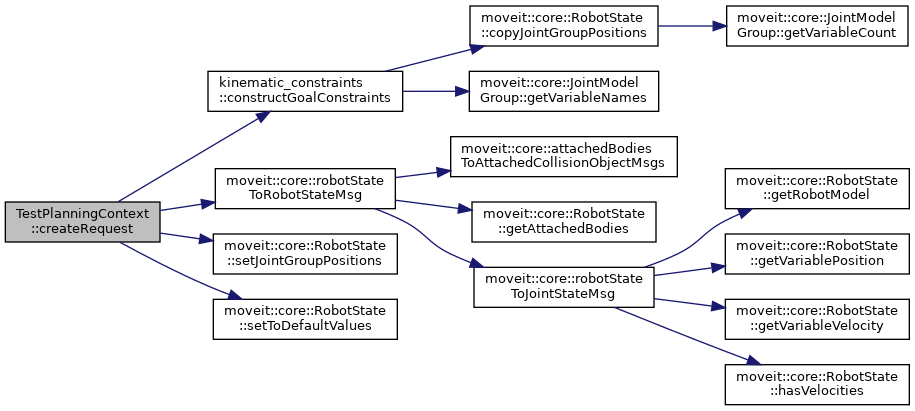
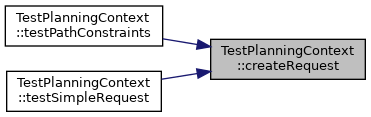
◆ createRequest()
|
inlineprotected |
Create a planning request to plan from a given start state to a joint space goal.
Definition at line 218 of file test_planning_context_manager.cpp.
◆ SetUp()
|
inlineoverrideprotected |
Definition at line 210 of file test_planning_context_manager.cpp.
◆ testPathConstraints()
|
inline |
Definition at line 113 of file test_planning_context_manager.cpp.
◆ testSimpleRequest()
|
inline |
Definition at line 78 of file test_planning_context_manager.cpp.
Member Data Documentation
◆ constraint_sampler_manager_
|
protected |
Definition at line 290 of file test_planning_context_manager.cpp.
◆ node_
|
protected |
Ideally we add an IK plugin to the joint_model_group_ to test the PoseModel state space, using the pluginlib to load the default KDL plugin? we need a node handle to call getPlanningRequest, but it is never used, as we disable the 'use_constraints_approximation' option.
Definition at line 298 of file test_planning_context_manager.cpp.
◆ planning_context_
|
protected |
Definition at line 287 of file test_planning_context_manager.cpp.
◆ planning_context_spec_
|
protected |
Definition at line 286 of file test_planning_context_manager.cpp.
◆ planning_scene_
|
protected |
Definition at line 288 of file test_planning_context_manager.cpp.
◆ state_space_
|
protected |
Definition at line 285 of file test_planning_context_manager.cpp.
The documentation for this class was generated from the following file:
- moveit_planners/ompl/ompl_interface/test/test_planning_context_manager.cpp