Obtains cartesian limits from the node parameters. More...
#include <cartesian_limits_aggregator.h>
Static Public Member Functions | |
| static CartesianLimit | getAggregatedLimits (const rclcpp::Node::SharedPtr &node, const std::string ¶m_namespace) |
| Loads cartesian limits from the node parameters. More... | |
Detailed Description
Obtains cartesian limits from the node parameters.
Definition at line 45 of file cartesian_limits_aggregator.h.
Member Function Documentation
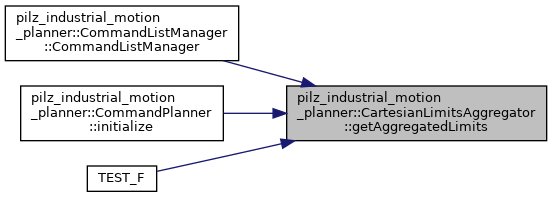
◆ getAggregatedLimits()
|
static |
Loads cartesian limits from the node parameters.
The parameters are expected to be under "~/cartesian_limits" of the given node handle. The following limits can be specified:
- "max_trans_vel", the maximum translational velocity [m/s]
- "max_trans_acc, the maximum translational acceleration [m/s^2]
- "max_trans_dec", the maximum translational deceleration (<= 0) [m/s^2]
- "max_rot_vel", the maximum rotational velocity [rad/s]
- "max_rot_acc", the maximum rotational acceleration [rad/s^2]
- "max_rot_dec", the maximum rotational deceleration (<= 0)[rad/s^2]
- Parameters
-
node node to access the parameters param_namespace the parameter name to access the parameters
- Returns
- the obtained cartesian limits
Definition at line 79 of file cartesian_limits_aggregator.cpp.
Here is the caller graph for this function:
The documentation for this class was generated from the following files:
- moveit_planners/pilz_industrial_motion_planner/include/pilz_industrial_motion_planner/cartesian_limits_aggregator.h
- moveit_planners/pilz_industrial_motion_planner/src/cartesian_limits_aggregator.cpp