#include <robot_poses.hpp>
Public Member Functions | |
| std::string | getName () const override |
| Returns the name of the setup step. More... | |
| void | onInit () override |
| Overridable initialization method. More... | |
| bool | isReady () const override |
| Return true if the data necessary to proceed with this step has been configured. More... | |
| std::vector< std::string > | getGroupNames () const |
| srdf::Model::GroupState * | findPoseByName (const std::string &name, const std::string &group) |
| std::vector< srdf::Model::GroupState > & | getGroupStates () |
| moveit::core::RobotState & | getState () |
| void | publishState (const moveit::core::RobotState &robot_state) |
| Publish the given state on the moveit_robot_state topic. More... | |
| bool | checkSelfCollision (const moveit::core::RobotState &robot_state) |
| Check if the given robot state is in collision. More... | |
| std::vector< const moveit::core::JointModel * > | getSimpleJointModels (const std::string &group_name) const |
| Returns a vector of joint models for the given group name. More... | |
| void | removePoseByName (const std::string &pose_name, const std::string &group_name) |
| void | setToCurrentValues (srdf::Model::GroupState &group_state) |
| void | loadAllowedCollisionMatrix () |
| Load the allowed collision matrix from the SRDF's list of link pairs. More... | |
 Public Member Functions inherited from moveit_setup::srdf_setup::SRDFStep Public Member Functions inherited from moveit_setup::srdf_setup::SRDFStep | |
| void | onInit () override |
| Overridable initialization method. More... | |
| bool | isReady () const override |
| Return true if the data necessary to proceed with this step has been configured. More... | |
| bool | hasGroups () const |
| Public Member Functions inherited from moveit_setup::SetupStep | |
| SetupStep ()=default | |
| SetupStep (const SetupStep &)=default | |
| SetupStep (SetupStep &&)=default | |
| SetupStep & | operator= (const SetupStep &)=default |
| SetupStep & | operator= (SetupStep &&)=default |
| virtual | ~SetupStep ()=default |
| void | initialize (const rclcpp::Node::SharedPtr &parent_node, const DataWarehousePtr &config_data) |
| Called after construction to initialize the step. More... | |
| const rclcpp::Logger & | getLogger () const |
| Makes a namespaced logger for this step available to the widget. More... | |
Protected Attributes | |
| rclcpp::Publisher< moveit_msgs::msg::DisplayRobotState >::SharedPtr | pub_robot_state_ |
| Remember the publisher for quick publishing later. More... | |
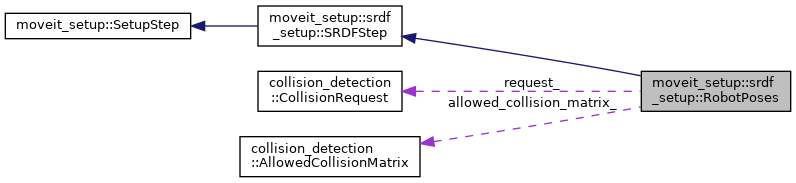
| collision_detection::CollisionRequest | request_ |
| collision_detection::AllowedCollisionMatrix | allowed_collision_matrix_ |
| Allowed collision matrix for robot poses. More... | |
| Protected Attributes inherited from moveit_setup::srdf_setup::SRDFStep | |
| std::shared_ptr< SRDFConfig > | srdf_config_ |
| Protected Attributes inherited from moveit_setup::SetupStep | |
| DataWarehousePtr | config_data_ |
| rclcpp::Node::SharedPtr | parent_node_ |
| std::shared_ptr< rclcpp::Logger > | logger_ |
Detailed Description
Definition at line 46 of file robot_poses.hpp.
Member Function Documentation
◆ checkSelfCollision()
| bool moveit_setup::srdf_setup::RobotPoses::checkSelfCollision | ( | const moveit::core::RobotState & | robot_state | ) |
Check if the given robot state is in collision.
Definition at line 111 of file robot_poses.cpp.
◆ findPoseByName()
| srdf::Model::GroupState * moveit_setup::srdf_setup::RobotPoses::findPoseByName | ( | const std::string & | name, |
| const std::string & | group | ||
| ) |
Find the associated data by name
- Parameters
-
name - name of data to find in datastructure
- Returns
- pointer to data in datastructure
Definition at line 66 of file robot_poses.cpp.
◆ getGroupNames()
|
inline |
Definition at line 61 of file robot_poses.hpp.
◆ getGroupStates()
|
inline |
Definition at line 74 of file robot_poses.hpp.
◆ getName()
|
inlineoverridevirtual |
Returns the name of the setup step.
Implements moveit_setup::SetupStep.
Definition at line 49 of file robot_poses.hpp.
◆ getSimpleJointModels()
| std::vector< const moveit::core::JointModel * > moveit_setup::srdf_setup::RobotPoses::getSimpleJointModels | ( | const std::string & | group_name | ) | const |
Returns a vector of joint models for the given group name.
- Exceptions
-
runtime_error if the group does not exist
Note: "Simple" means we exclude Passive/Mimic/MultiDOF joints
Definition at line 119 of file robot_poses.cpp.


◆ getState()
|
inline |
Definition at line 79 of file robot_poses.hpp.
◆ isReady()
|
inlineoverridevirtual |
Return true if the data necessary to proceed with this step has been configured.
Reimplemented from moveit_setup::SetupStep.
Definition at line 56 of file robot_poses.hpp.

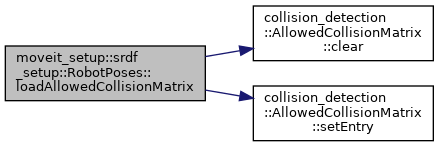
◆ loadAllowedCollisionMatrix()
| void moveit_setup::srdf_setup::RobotPoses::loadAllowedCollisionMatrix | ( | ) |
Load the allowed collision matrix from the SRDF's list of link pairs.
Definition at line 86 of file robot_poses.cpp.

◆ onInit()
|
overridevirtual |
Overridable initialization method.
Reimplemented from moveit_setup::SetupStep.
Definition at line 44 of file robot_poses.cpp.

◆ publishState()
| void moveit_setup::srdf_setup::RobotPoses::publishState | ( | const moveit::core::RobotState & | robot_state | ) |
Publish the given state on the moveit_robot_state topic.
Definition at line 101 of file robot_poses.cpp.

◆ removePoseByName()
|
inline |
Definition at line 102 of file robot_poses.hpp.
◆ setToCurrentValues()
| void moveit_setup::srdf_setup::RobotPoses::setToCurrentValues | ( | srdf::Model::GroupState & | group_state | ) |

Member Data Documentation
◆ allowed_collision_matrix_
|
protected |
Allowed collision matrix for robot poses.
Definition at line 122 of file robot_poses.hpp.
◆ pub_robot_state_
|
protected |
Remember the publisher for quick publishing later.
Definition at line 114 of file robot_poses.hpp.
◆ request_
|
protected |
Definition at line 119 of file robot_poses.hpp.
The documentation for this class was generated from the following files:
- moveit_setup_assistant/moveit_setup_srdf_plugins/include/moveit_setup_srdf_plugins/robot_poses.hpp
- moveit_setup_assistant/moveit_setup_srdf_plugins/src/robot_poses.cpp