Bundles the data for a collision query. More...
#include <basic_types.h>
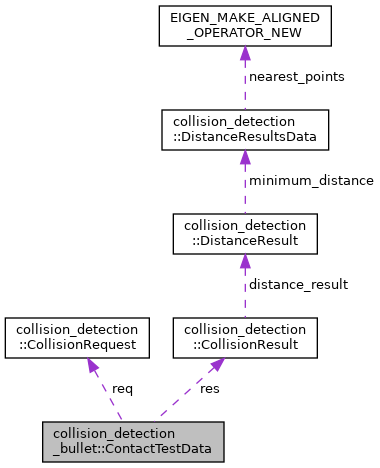
Collaboration diagram for collision_detection_bullet::ContactTestData:
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | ContactTestData (const std::vector< std::string > &active, const double &contact_distance, collision_detection::CollisionResult &res, const collision_detection::CollisionRequest &req) |
Public Attributes | |
| const std::vector< std::string > & | active |
| const double & | contact_distance |
| If after a positive broadphase check the distance is below this threshold, a contact is added. More... | |
| collision_detection::CollisionResult & | res |
| const collision_detection::CollisionRequest & | req |
| bool | done |
| Indicates if search is finished. More... | |
| bool | pair_done |
| Indicates if search between a single pair is finished. More... | |
Detailed Description
Bundles the data for a collision query.
Definition at line 58 of file basic_types.h.
Constructor & Destructor Documentation
◆ ContactTestData()
|
inline |
Definition at line 62 of file basic_types.h.
Member Data Documentation
◆ active
| const std::vector<std::string>& collision_detection_bullet::ContactTestData::active |
Definition at line 68 of file basic_types.h.
◆ contact_distance
| const double& collision_detection_bullet::ContactTestData::contact_distance |
If after a positive broadphase check the distance is below this threshold, a contact is added.
Definition at line 71 of file basic_types.h.
◆ done
| bool collision_detection_bullet::ContactTestData::done |
Indicates if search is finished.
Definition at line 77 of file basic_types.h.
◆ pair_done
| bool collision_detection_bullet::ContactTestData::pair_done |
Indicates if search between a single pair is finished.
Definition at line 80 of file basic_types.h.
◆ req
| const collision_detection::CollisionRequest& collision_detection_bullet::ContactTestData::req |
Definition at line 74 of file basic_types.h.
◆ res
| collision_detection::CollisionResult& collision_detection_bullet::ContactTestData::res |
Definition at line 73 of file basic_types.h.
The documentation for this struct was generated from the following file:
- moveit_core/collision_detection_bullet/include/moveit/collision_detection_bullet/bullet_integration/basic_types.h