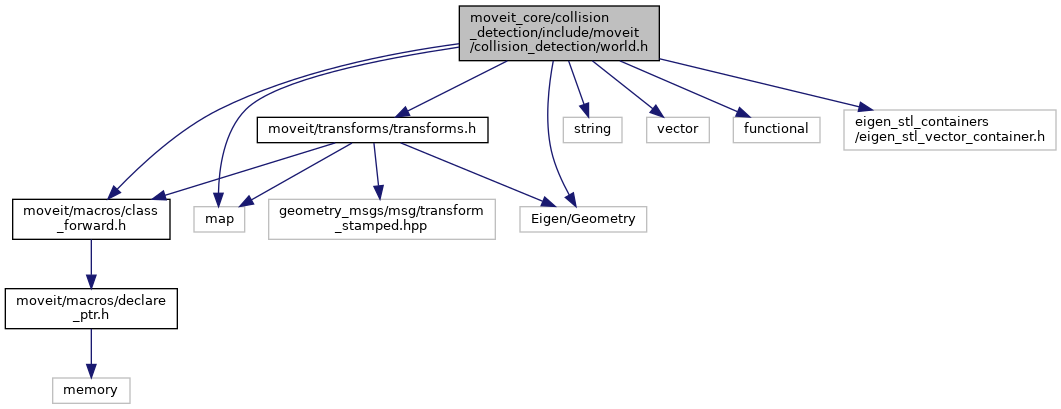
#include <moveit/macros/class_forward.h>#include <string>#include <vector>#include <map>#include <functional>#include <Eigen/Geometry>#include <eigen_stl_containers/eigen_stl_vector_container.h>#include <moveit/transforms/transforms.h>
Include dependency graph for world.h:
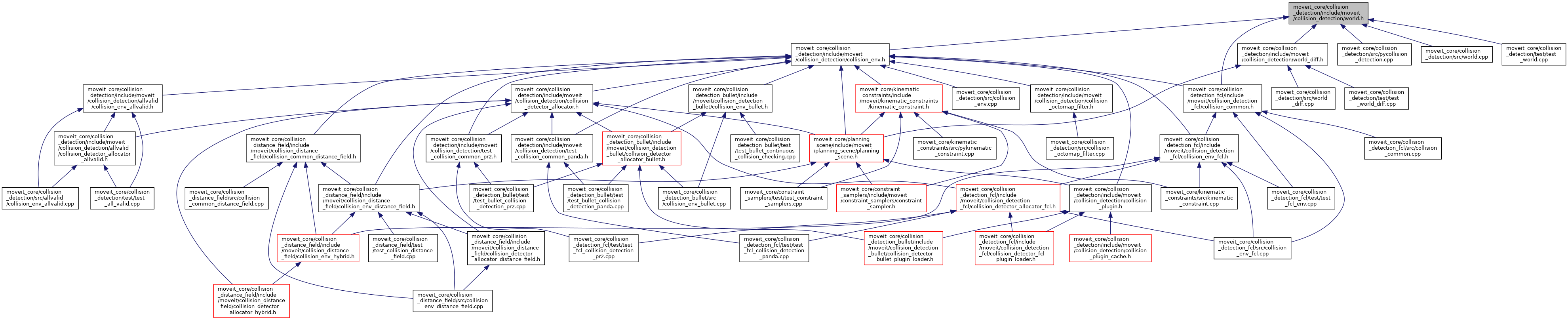
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | collision_detection::World |
| Maintain a representation of the environment. More... | |
| struct | collision_detection::World::Object |
| A representation of an object. More... | |
| class | collision_detection::World::Action |
| Represents an action that occurred on an object in the world. Several bits may be set indicating several things happened to the object. If the DESTROY bit is set, other bits will not be set. More... | |
| class | collision_detection::World::ObserverHandle |
Namespaces | |
| shapes | |
| collision_detection | |
Functions | |
| shapes::MOVEIT_CLASS_FORWARD (Shape) | |
| collision_detection::MOVEIT_CLASS_FORWARD (World) | |