Maintain a sequence of waypoints and the time durations between these waypoints. More...
#include <robot_trajectory.hpp>
Classes | |
| class | Iterator |
Public Member Functions | |
| RobotTrajectory (const moveit::core::RobotModelConstPtr &robot_model) | |
| construct a trajectory for the whole robot | |
| RobotTrajectory (const moveit::core::RobotModelConstPtr &robot_model, const std::string &group) | |
construct a trajectory for the named JointModelGroup If group is an empty string, this is equivalent to the first constructor, otherwise it is equivalent to RobotTrajectory(robot_model, robot_model->getJointModelGroup(group)). | |
| RobotTrajectory (const moveit::core::RobotModelConstPtr &robot_model, const moveit::core::JointModelGroup *group) | |
| construct a trajectory for the JointModelGroup Only joints from the specified group will be considered in this trajectory, even though all waypoints still consist of full RobotStates (representing all joints). | |
| RobotTrajectory & | operator= (const RobotTrajectory &)=default |
| RobotTrajectory (const RobotTrajectory &other, bool deepcopy=false) | |
| Copy constructor allowing a shallow or deep copy of waypoints. | |
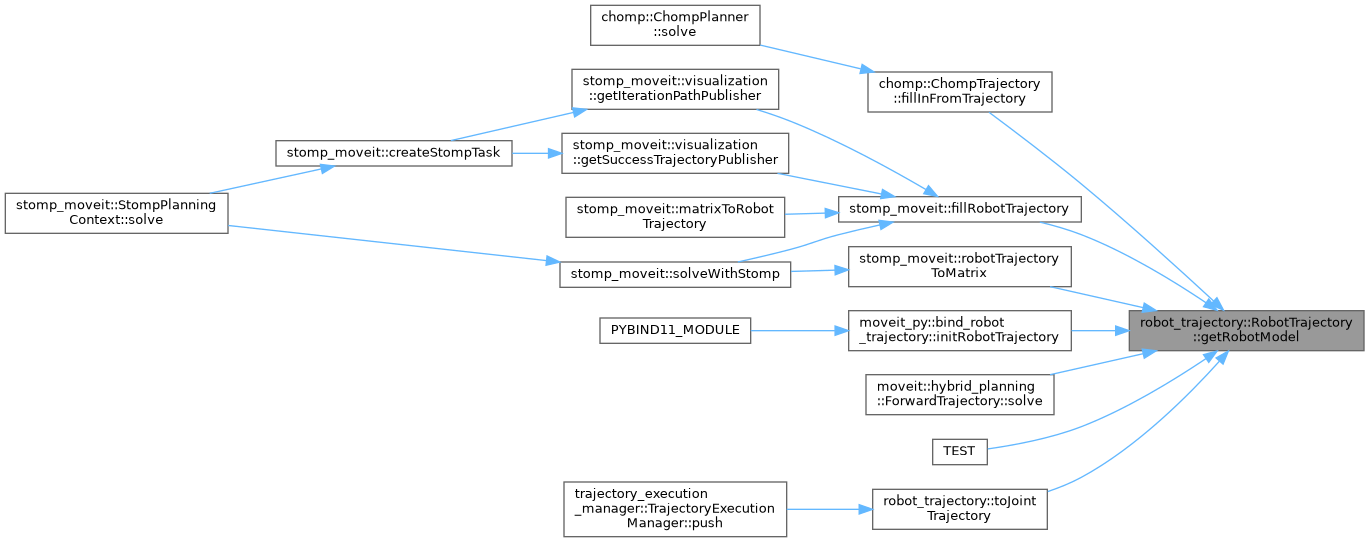
| const moveit::core::RobotModelConstPtr & | getRobotModel () const |
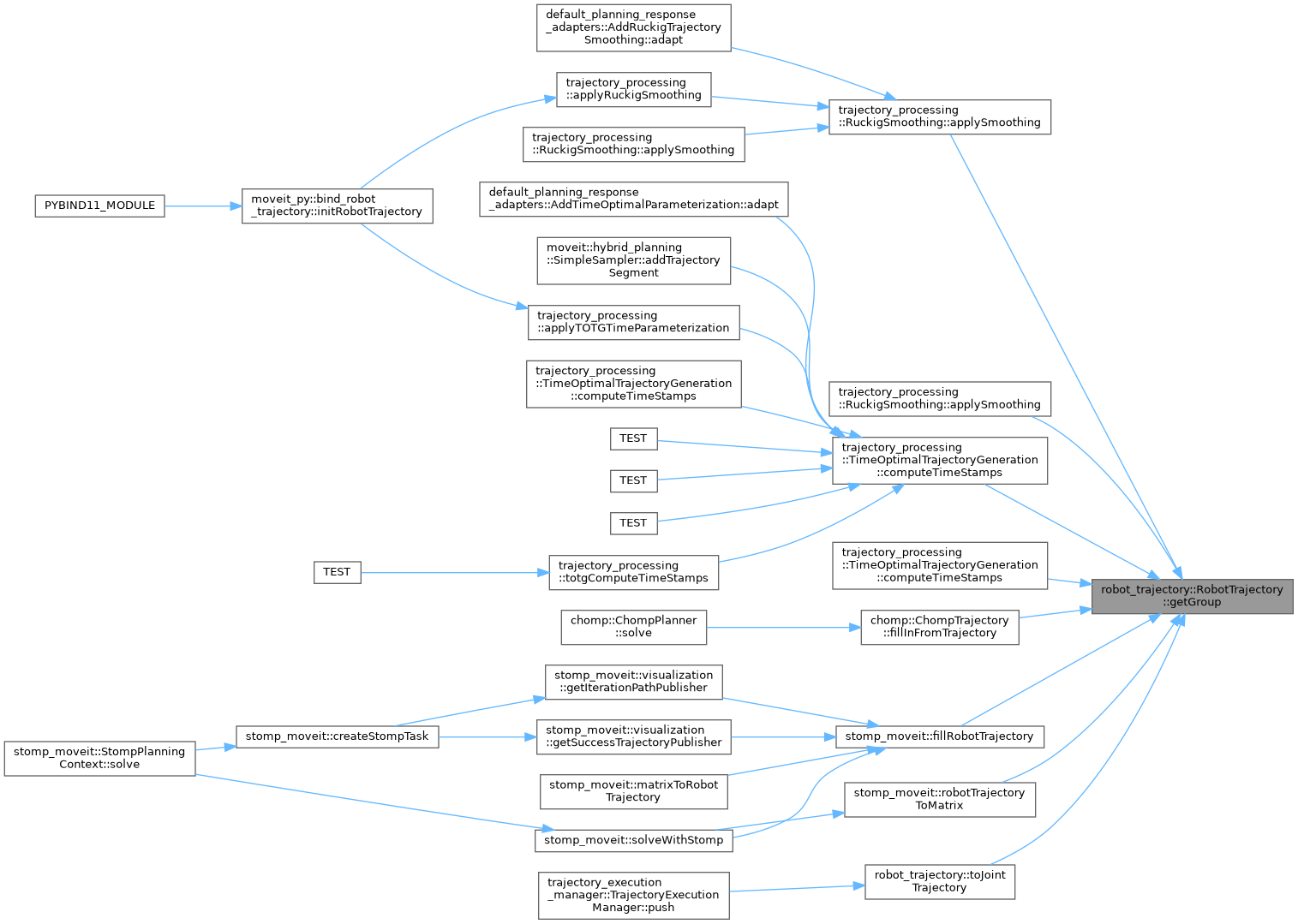
| const moveit::core::JointModelGroup * | getGroup () const |
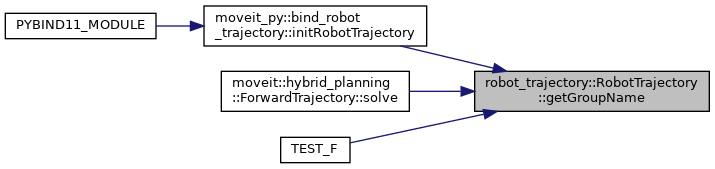
| const std::string & | getGroupName () const |
| RobotTrajectory & | setGroupName (const std::string &group_name) |
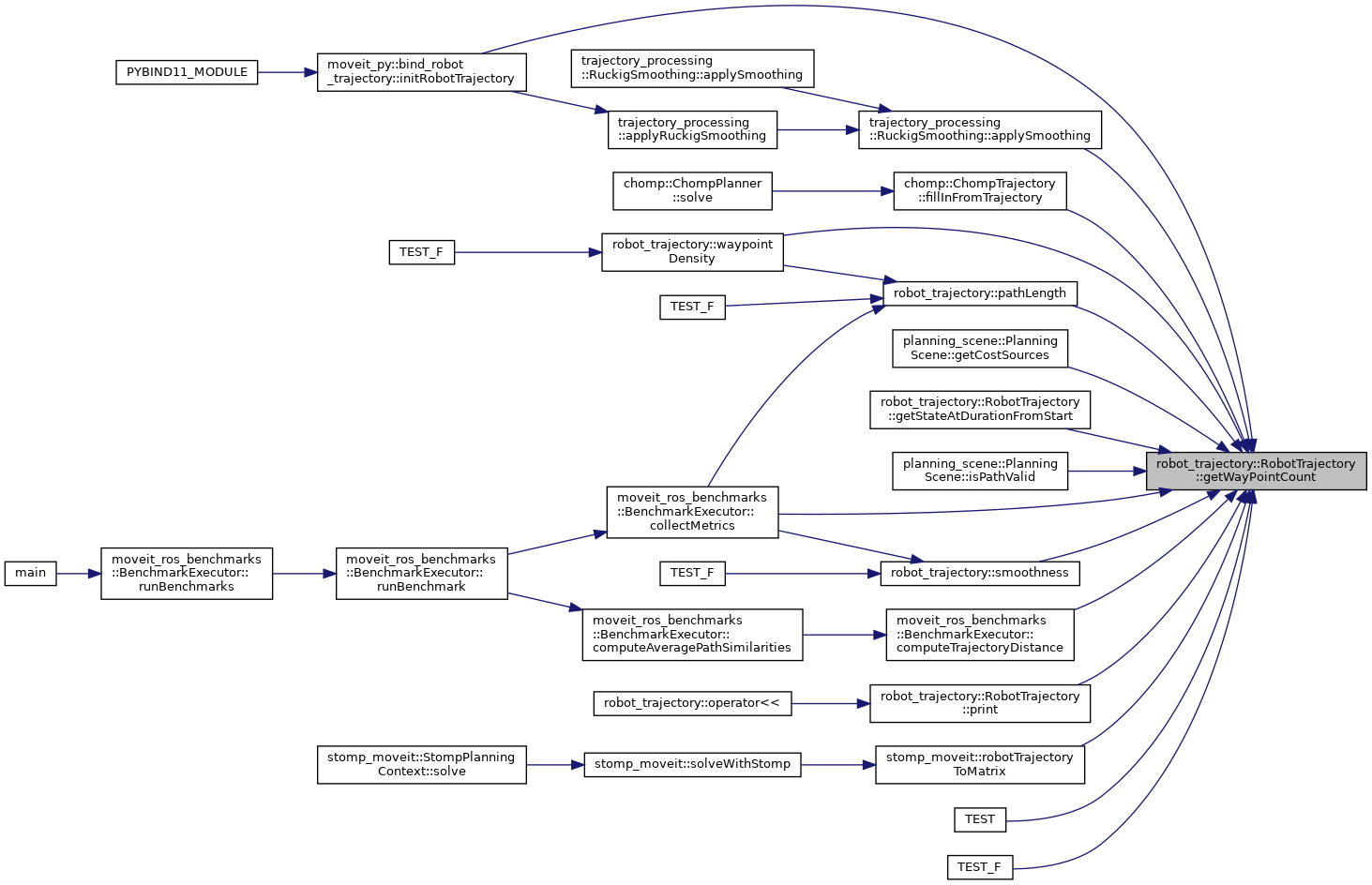
| std::size_t | getWayPointCount () const |
| std::size_t | size () const |
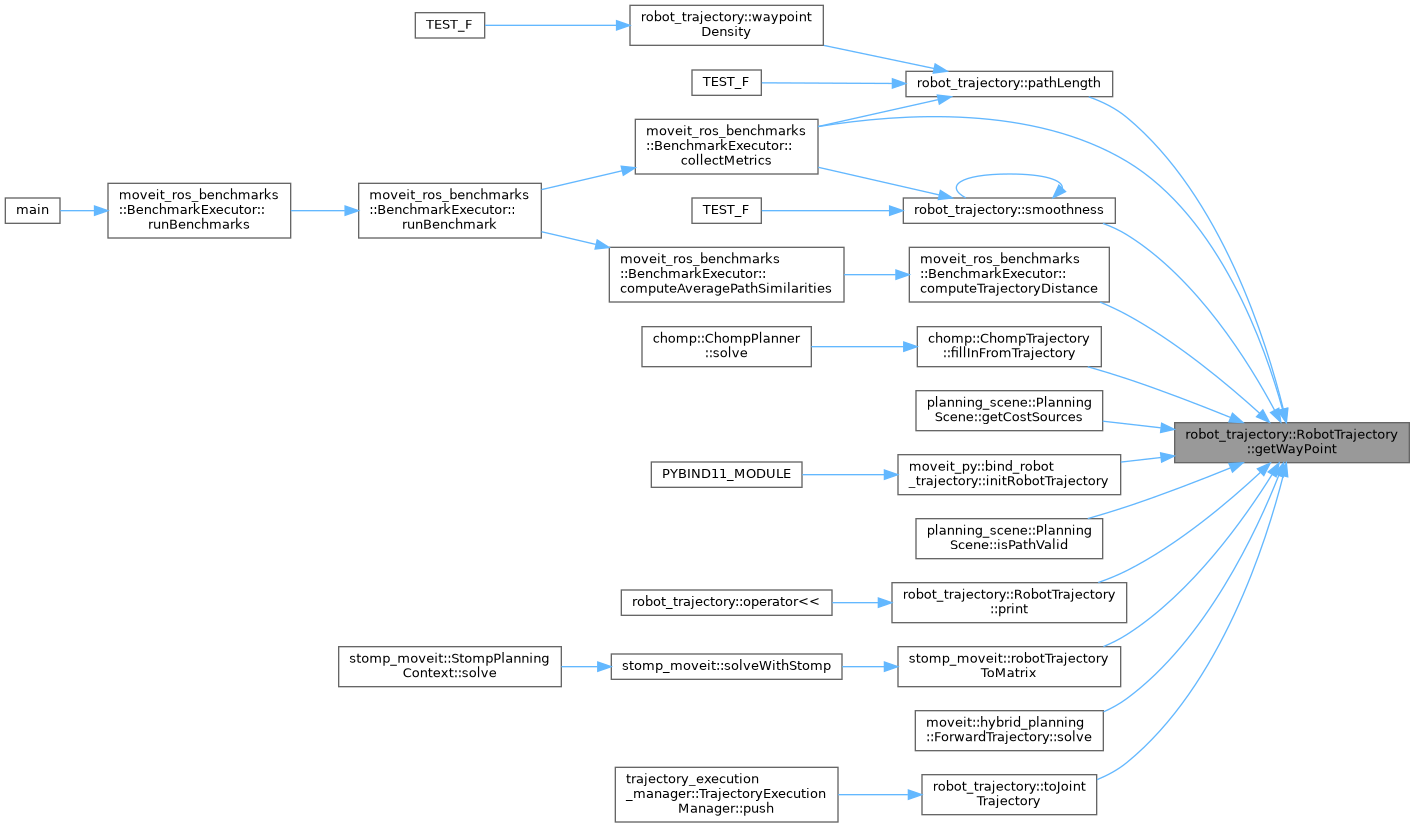
| const moveit::core::RobotState & | getWayPoint (std::size_t index) const |
| const moveit::core::RobotState & | getLastWayPoint () const |
| const moveit::core::RobotState & | getFirstWayPoint () const |
| moveit::core::RobotStatePtr & | getWayPointPtr (std::size_t index) |
| moveit::core::RobotStatePtr & | getLastWayPointPtr () |
| moveit::core::RobotStatePtr & | getFirstWayPointPtr () |
| const std::deque< double > & | getWayPointDurations () const |
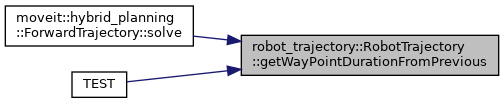
| double | getWayPointDurationFromStart (std::size_t index) const |
| Returns the duration after start that a waypoint will be reached. | |
| double | getWayPointDurationFromPrevious (std::size_t index) const |
| RobotTrajectory & | setWayPointDurationFromPrevious (std::size_t index, double value) |
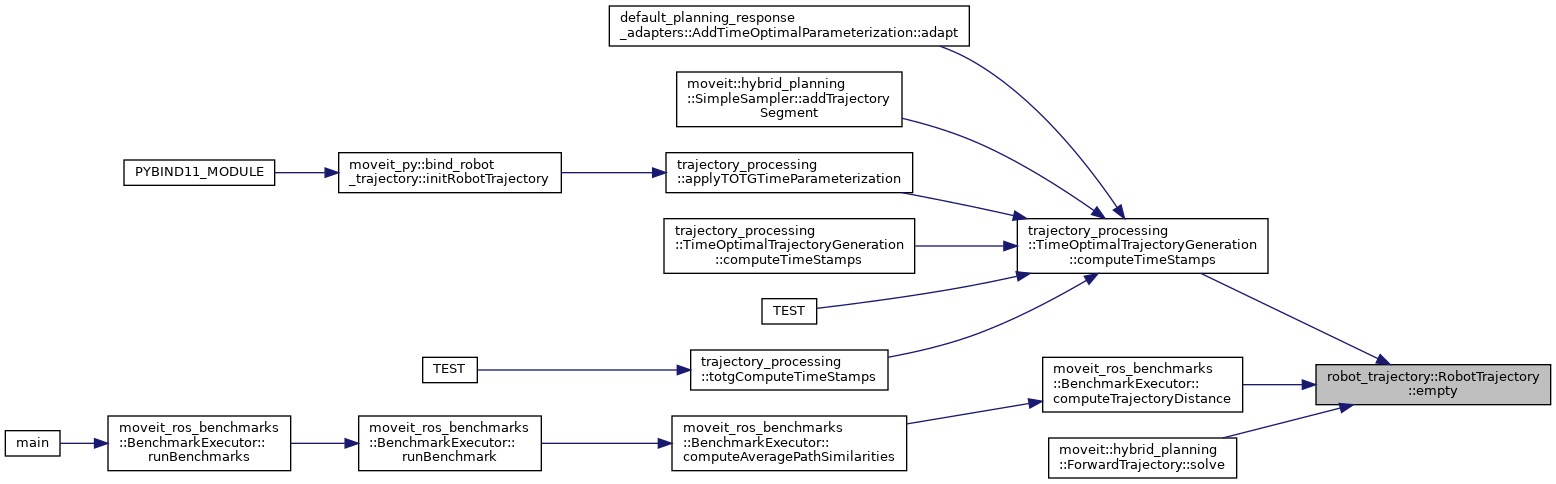
| bool | empty () const |
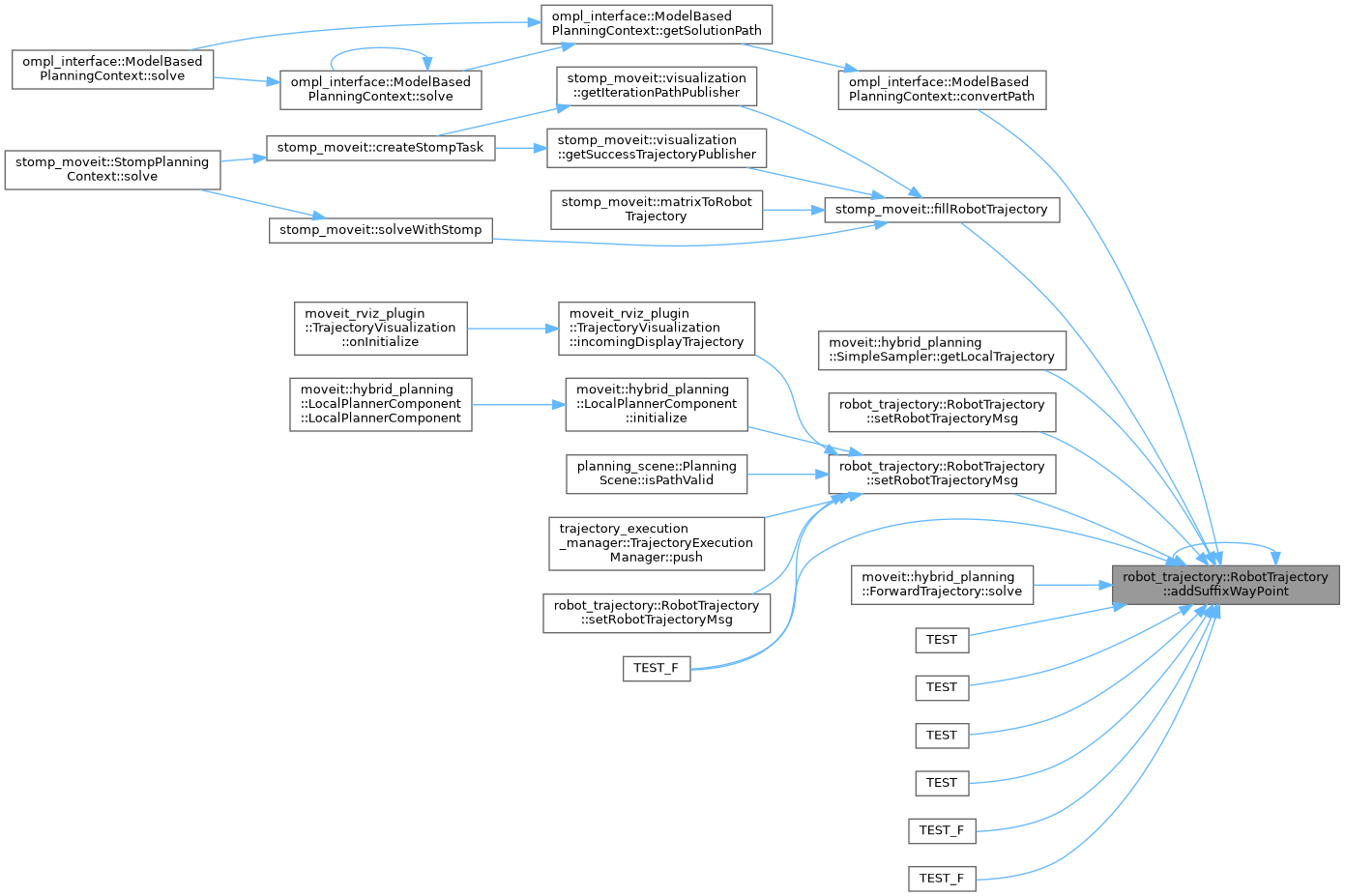
| RobotTrajectory & | addSuffixWayPoint (const moveit::core::RobotState &state, double dt) |
| Add a point to the trajectory. | |
| RobotTrajectory & | addSuffixWayPoint (const moveit::core::RobotStatePtr &state, double dt) |
| Add a point to the trajectory. | |
| RobotTrajectory & | addPrefixWayPoint (const moveit::core::RobotState &state, double dt) |
| RobotTrajectory & | addPrefixWayPoint (const moveit::core::RobotStatePtr &state, double dt) |
| RobotTrajectory & | insertWayPoint (std::size_t index, const moveit::core::RobotState &state, double dt) |
| RobotTrajectory & | insertWayPoint (std::size_t index, const moveit::core::RobotStatePtr &state, double dt) |
| RobotTrajectory & | append (const RobotTrajectory &source, double dt, size_t start_index=0, size_t end_index=std::numeric_limits< std::size_t >::max()) |
Add a specified part of a trajectory to the end of the current trajectory. The default (when start_index and end_index are omitted) is to add the whole trajectory. | |
| void | swap (robot_trajectory::RobotTrajectory &other) noexcept |
| RobotTrajectory & | removeWayPoint (std::size_t index) |
| Remove a point from the trajectory. | |
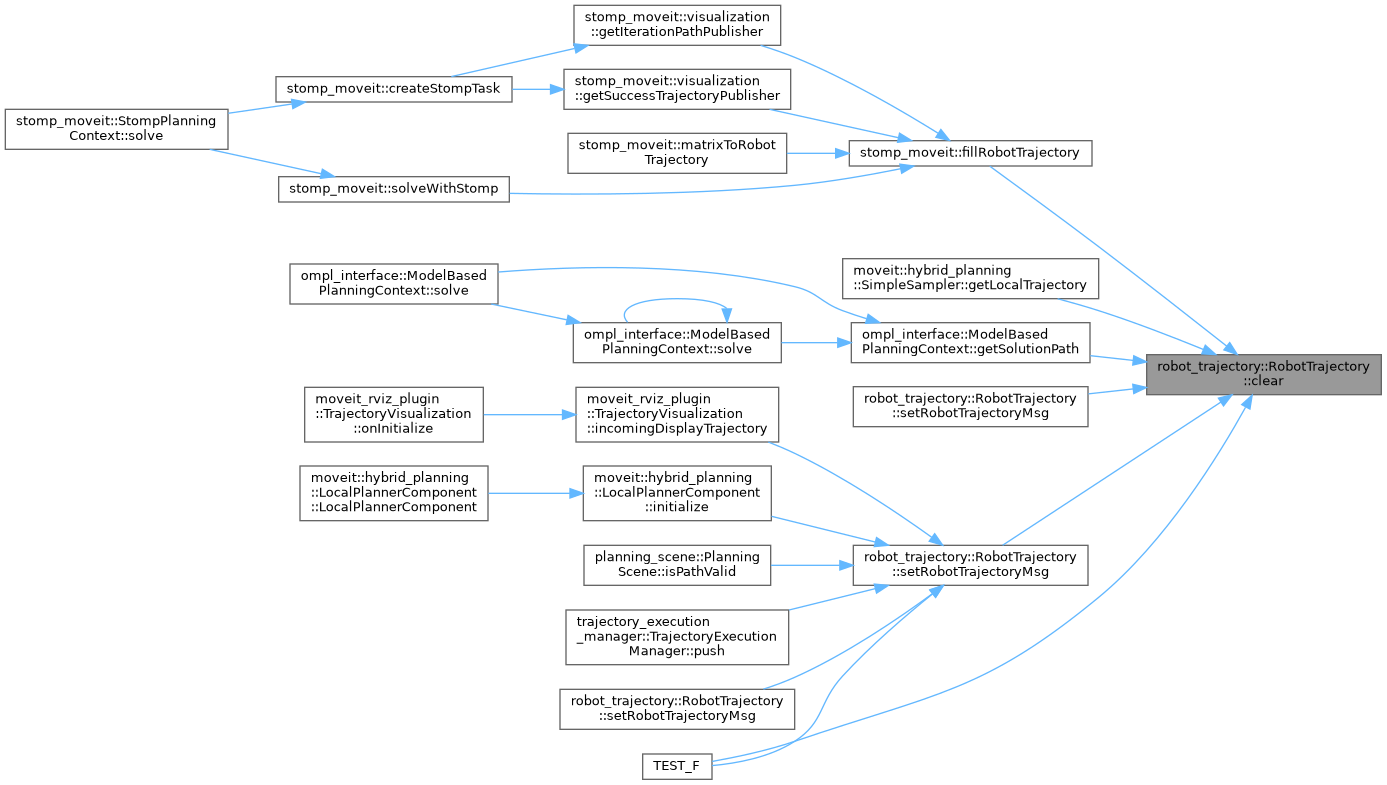
| RobotTrajectory & | clear () |
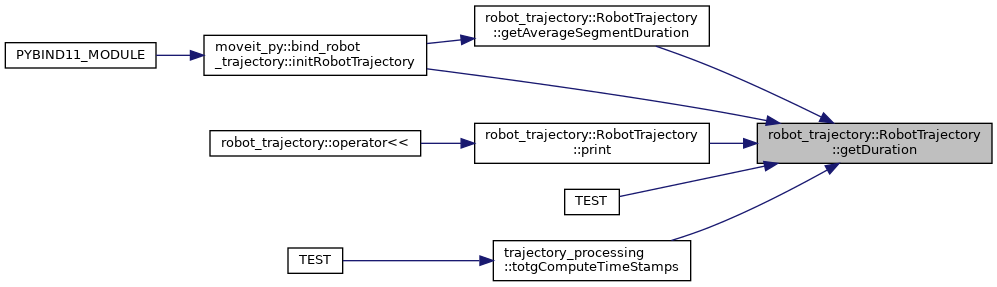
| double | getDuration () const |
| double | getAverageSegmentDuration () const |
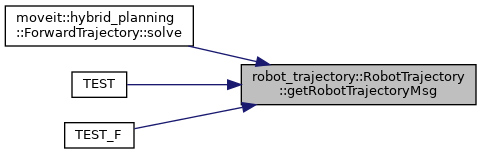
| void | getRobotTrajectoryMsg (moveit_msgs::msg::RobotTrajectory &trajectory, const std::vector< std::string > &joint_filter=std::vector< std::string >()) const |
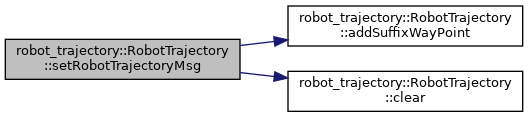
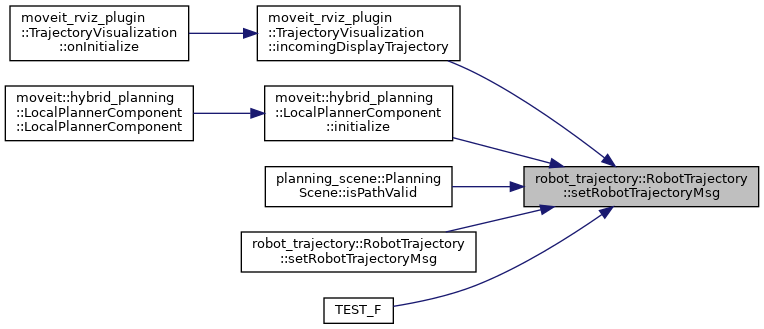
| RobotTrajectory & | setRobotTrajectoryMsg (const moveit::core::RobotState &reference_state, const trajectory_msgs::msg::JointTrajectory &trajectory) |
| Copy the content of the trajectory message into this class. The trajectory message itself is not required to contain the values for all joints. For this reason a full starting state must be specified as reference (reference_state). Each point in the trajectory to be constructed internally is obtained by copying the reference state and overwriting the content from a trajectory point in trajectory. | |
| RobotTrajectory & | setRobotTrajectoryMsg (const moveit::core::RobotState &reference_state, const moveit_msgs::msg::RobotTrajectory &trajectory) |
| Copy the content of the trajectory message into this class. The trajectory message itself is not required to contain the values for all joints. For this reason a full starting state must be specified as reference (reference_state). Each point in the trajectory to be constructed internally is obtained by copying the reference state and overwriting the content from a trajectory point in trajectory. | |
| RobotTrajectory & | setRobotTrajectoryMsg (const moveit::core::RobotState &reference_state, const moveit_msgs::msg::RobotState &state, const moveit_msgs::msg::RobotTrajectory &trajectory) |
| Copy the content of the trajectory message into this class. The trajectory message itself is not required to contain the values for all joints. For this reason a full starting state must be specified as reference (reference_state). Before use, the reference state is updated using state. Each point in the trajectory to be constructed internally is obtained by copying the reference state and overwriting the content from a trajectory point in trajectory. | |
| RobotTrajectory & | reverse () |
| RobotTrajectory & | unwind () |
| RobotTrajectory & | unwind (const moveit::core::RobotState &state) |
| Unwind, starting from an initial state. | |
| void | findWayPointIndicesForDurationAfterStart (double duration, int &before, int &after, double &blend) const |
| Finds the waypoint indices before and after a duration from start. | |
| bool | getStateAtDurationFromStart (const double request_duration, moveit::core::RobotStatePtr &output_state) const |
| Gets a robot state corresponding to a supplied duration from start for the trajectory, using linear time interpolation. | |
| RobotTrajectory::Iterator | begin () |
| RobotTrajectory::Iterator | end () |
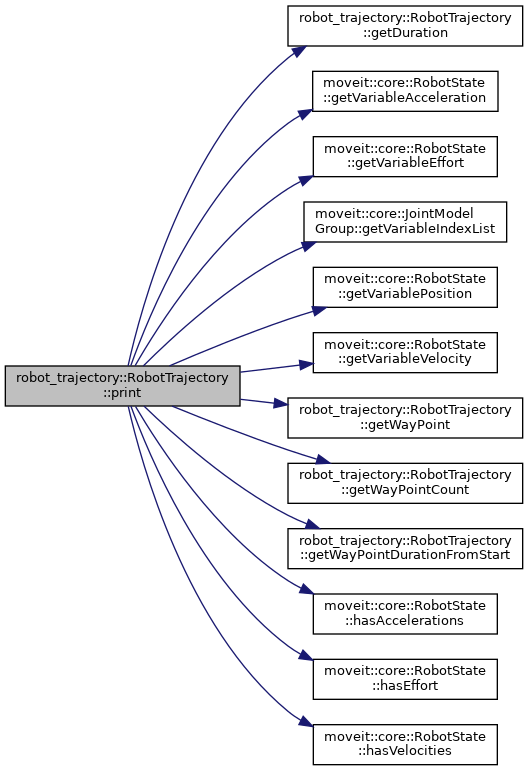
| void | print (std::ostream &out, std::vector< int > variable_indexes=std::vector< int >()) const |
| Print information about the trajectory. | |
Detailed Description
Maintain a sequence of waypoints and the time durations between these waypoints.
Definition at line 59 of file robot_trajectory.hpp.
Constructor & Destructor Documentation
◆ RobotTrajectory() [1/4]
|
explicit |
construct a trajectory for the whole robot
Definition at line 59 of file robot_trajectory.cpp.
◆ RobotTrajectory() [2/4]
| robot_trajectory::RobotTrajectory::RobotTrajectory | ( | const moveit::core::RobotModelConstPtr & | robot_model, |
| const std::string & | group | ||
| ) |
construct a trajectory for the named JointModelGroup If group is an empty string, this is equivalent to the first constructor, otherwise it is equivalent to RobotTrajectory(robot_model, robot_model->getJointModelGroup(group)).
Definition at line 64 of file robot_trajectory.cpp.
◆ RobotTrajectory() [3/4]
| robot_trajectory::RobotTrajectory::RobotTrajectory | ( | const moveit::core::RobotModelConstPtr & | robot_model, |
| const moveit::core::JointModelGroup * | group | ||
| ) |
construct a trajectory for the JointModelGroup Only joints from the specified group will be considered in this trajectory, even though all waypoints still consist of full RobotStates (representing all joints).
If group is nullptr this is equivalent to the first constructor.
Definition at line 69 of file robot_trajectory.cpp.
◆ RobotTrajectory() [4/4]
| robot_trajectory::RobotTrajectory::RobotTrajectory | ( | const RobotTrajectory & | other, |
| bool | deepcopy = false |
||
| ) |
Copy constructor allowing a shallow or deep copy of waypoints.
- Parameters
-
other - RobotTrajectory to copy from deepcopy - copy waypoints by value (true) or by pointer (false)?
Definition at line 75 of file robot_trajectory.cpp.
Member Function Documentation
◆ addPrefixWayPoint() [1/2]
|
inline |
Definition at line 206 of file robot_trajectory.hpp.
◆ addPrefixWayPoint() [2/2]
|
inline |
Definition at line 211 of file robot_trajectory.hpp.
◆ addSuffixWayPoint() [1/2]
|
inline |
Add a point to the trajectory.
- Parameters
-
state - current robot state dt - duration from previous
Definition at line 188 of file robot_trajectory.hpp.
◆ addSuffixWayPoint() [2/2]
|
inline |
Add a point to the trajectory.
- Parameters
-
state - current robot state dt - duration from previous
Definition at line 198 of file robot_trajectory.hpp.
◆ append()
| RobotTrajectory & robot_trajectory::RobotTrajectory::append | ( | const RobotTrajectory & | source, |
| double | dt, | ||
| size_t | start_index = 0, |
||
| size_t | end_index = std::numeric_limits<std::size_t>::max() |
||
| ) |
Add a specified part of a trajectory to the end of the current trajectory. The default (when start_index and end_index are omitted) is to add the whole trajectory.
- Parameters
-
source - the trajectory containing the part to append to the end of current trajectory dt - time step between last traj point in current traj and first traj point of append traj start_index - index of first traj point of the part to append from the source traj, the default is to add from the start of the source traj end_index - index of last traj point of the part to append from the source traj, the default is to add until the end of the source traj
Definition at line 132 of file robot_trajectory.cpp.

◆ begin()
|
inline |

◆ clear()
|
inline |
◆ empty()
|
inline |
◆ end()
|
inline |

◆ findWayPointIndicesForDurationAfterStart()
| void robot_trajectory::RobotTrajectory::findWayPointIndicesForDurationAfterStart | ( | double | duration, |
| int & | before, | ||
| int & | after, | ||
| double & | blend | ||
| ) | const |
Finds the waypoint indices before and after a duration from start.
- Parameters
-
The duration from start. The waypoint index before the supplied duration. The waypoint index after (or equal to) the supplied duration. The progress (0 to 1) between the two waypoints, based on time (not based on joint distances).
Definition at line 509 of file robot_trajectory.cpp.

◆ getAverageSegmentDuration()
| double robot_trajectory::RobotTrajectory::getAverageSegmentDuration | ( | ) | const |
Definition at line 101 of file robot_trajectory.cpp.


◆ getDuration()
| double robot_trajectory::RobotTrajectory::getDuration | ( | ) | const |
◆ getFirstWayPoint()
|
inline |
Definition at line 127 of file robot_trajectory.hpp.
◆ getFirstWayPointPtr()
|
inline |

◆ getGroup()
|
inline |
◆ getGroupName()
| const std::string & robot_trajectory::RobotTrajectory::getGroupName | ( | ) | const |
Definition at line 88 of file robot_trajectory.cpp.

◆ getLastWayPoint()
|
inline |

◆ getLastWayPointPtr()
|
inline |
Definition at line 137 of file robot_trajectory.hpp.
◆ getRobotModel()
|
inline |
◆ getRobotTrajectoryMsg()
| void robot_trajectory::RobotTrajectory::getRobotTrajectoryMsg | ( | moveit_msgs::msg::RobotTrajectory & | trajectory, |
| const std::vector< std::string > & | joint_filter = std::vector<std::string>() |
||
| ) | const |
Definition at line 265 of file robot_trajectory.cpp.

◆ getStateAtDurationFromStart()
| bool robot_trajectory::RobotTrajectory::getStateAtDurationFromStart | ( | const double | request_duration, |
| moveit::core::RobotStatePtr & | output_state | ||
| ) | const |
Gets a robot state corresponding to a supplied duration from start for the trajectory, using linear time interpolation.
- Parameters
-
The duration from start. The resulting robot state.
- Returns
- True if state is valid, false otherwise (trajectory is empty).
Definition at line 557 of file robot_trajectory.cpp.

◆ getWayPoint()
|
inline |
◆ getWayPointCount()
|
inline |
◆ getWayPointDurationFromPrevious()
|
inline |
◆ getWayPointDurationFromStart()
| double robot_trajectory::RobotTrajectory::getWayPointDurationFromStart | ( | std::size_t | index | ) | const |
Returns the duration after start that a waypoint will be reached.
- Parameters
-
The waypoint index.
- Returns
- The duration from start; returns overall duration if index is out of range.
Definition at line 544 of file robot_trajectory.cpp.

◆ getWayPointDurations()
|
inline |

◆ getWayPointPtr()
|
inline |
Definition at line 132 of file robot_trajectory.hpp.
◆ insertWayPoint() [1/2]
|
inline |
Definition at line 219 of file robot_trajectory.hpp.
◆ insertWayPoint() [2/2]
|
inline |
Definition at line 224 of file robot_trajectory.hpp.
◆ operator=()
|
default |
Assignment operator, performing a shallow copy, i.e. copying waypoints by pointer
◆ print()
| void robot_trajectory::RobotTrajectory::print | ( | std::ostream & | out, |
| std::vector< int > | variable_indexes = std::vector<int>() |
||
| ) | const |
Print information about the trajectory.
- Parameters
-
out Stream to print to variable_indexes The indexes of the variables to print. If empty/not specified and the group is defined, then uses the indexes for the group If empty and the group is not defined, uses ALL variables in robot_model
e.g. Trajectory has 13 points over 2.965 seconds waypoint 0 time 0.000 pos 0.000 vel 0.000 acc 0.000 waypoint 1 time 0.067 pos 0.001 vel 0.033 acc 1.000 waypoint 2 time 0.665 pos 0.200 vel 0.632 acc 1.000 ...
Definition at line 573 of file robot_trajectory.cpp.

◆ removeWayPoint()
|
inline |
Remove a point from the trajectory.
- Parameters
-
index - the index to remove
Definition at line 251 of file robot_trajectory.hpp.
◆ reverse()
| RobotTrajectory & robot_trajectory::RobotTrajectory::reverse | ( | ) |

◆ setGroupName()
|
inline |

◆ setRobotTrajectoryMsg() [1/3]
| RobotTrajectory & robot_trajectory::RobotTrajectory::setRobotTrajectoryMsg | ( | const moveit::core::RobotState & | reference_state, |
| const moveit_msgs::msg::RobotState & | state, | ||
| const moveit_msgs::msg::RobotTrajectory & | trajectory | ||
| ) |
Copy the content of the trajectory message into this class. The trajectory message itself is not required to contain the values for all joints. For this reason a full starting state must be specified as reference (reference_state). Before use, the reference state is updated using state. Each point in the trajectory to be constructed internally is obtained by copying the reference state and overwriting the content from a trajectory point in trajectory.
Definition at line 500 of file robot_trajectory.cpp.

◆ setRobotTrajectoryMsg() [2/3]
| RobotTrajectory & robot_trajectory::RobotTrajectory::setRobotTrajectoryMsg | ( | const moveit::core::RobotState & | reference_state, |
| const moveit_msgs::msg::RobotTrajectory & | trajectory | ||
| ) |
Copy the content of the trajectory message into this class. The trajectory message itself is not required to contain the values for all joints. For this reason a full starting state must be specified as reference (reference_state). Each point in the trajectory to be constructed internally is obtained by copying the reference state and overwriting the content from a trajectory point in trajectory.
Definition at line 448 of file robot_trajectory.cpp.
◆ setRobotTrajectoryMsg() [3/3]
| RobotTrajectory & robot_trajectory::RobotTrajectory::setRobotTrajectoryMsg | ( | const moveit::core::RobotState & | reference_state, |
| const trajectory_msgs::msg::JointTrajectory & | trajectory | ||
| ) |
Copy the content of the trajectory message into this class. The trajectory message itself is not required to contain the values for all joints. For this reason a full starting state must be specified as reference (reference_state). Each point in the trajectory to be constructed internally is obtained by copying the reference state and overwriting the content from a trajectory point in trajectory.
Definition at line 420 of file robot_trajectory.cpp.
◆ setWayPointDurationFromPrevious()
|
inline |
Definition at line 170 of file robot_trajectory.hpp.
◆ size()
|
inline |
Definition at line 111 of file robot_trajectory.hpp.
◆ swap()
|
noexcept |

◆ unwind() [1/2]
| RobotTrajectory & robot_trajectory::RobotTrajectory::unwind | ( | ) |
Definition at line 167 of file robot_trajectory.cpp.


◆ unwind() [2/2]
| RobotTrajectory & robot_trajectory::RobotTrajectory::unwind | ( | const moveit::core::RobotState & | state | ) |
Unwind, starting from an initial state.
Definition at line 209 of file robot_trajectory.cpp.
The documentation for this class was generated from the following files:
- moveit_core/robot_trajectory/include/moveit/robot_trajectory/robot_trajectory.hpp
- moveit_core/robot_trajectory/src/robot_trajectory.cpp