Functions | |
| CostFn | getCostFunctionFromStateValidator (const StateValidatorFn &state_validator_fn, double interpolation_step_size) |
| CostFn | getCollisionCostFunction (const std::shared_ptr< const planning_scene::PlanningScene > &planning_scene, const moveit::core::JointModelGroup *group, double collision_penalty) |
| CostFn | getConstraintsCostFunction (const std::shared_ptr< const planning_scene::PlanningScene > &planning_scene, const moveit::core::JointModelGroup *group, const moveit_msgs::msg::Constraints &constraints_msg, double cost_scale) |
| CostFn | sum (const std::vector< CostFn > &cost_functions) |
Variables | |
| constexpr double | COL_CHECK_DISTANCE = 0.05 |
| constexpr double | CONSTRAINT_CHECK_DISTANCE = 0.05 |
Function Documentation
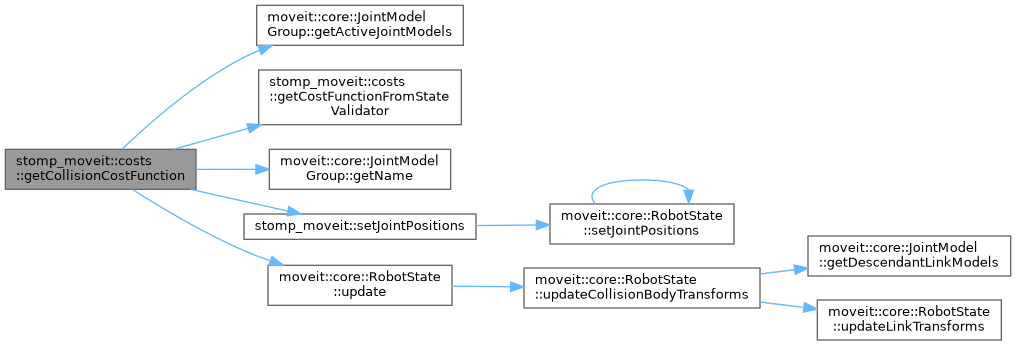
◆ getCollisionCostFunction()
| CostFn stomp_moveit::costs::getCollisionCostFunction | ( | const std::shared_ptr< const planning_scene::PlanningScene > & | planning_scene, |
| const moveit::core::JointModelGroup * | group, | ||
| double | collision_penalty | ||
| ) |
Creates a cost function for binary collisions of group states in the planning scene. This function uses a StateValidatorFn for computing smooth penalty costs from binary collision checks using getCostFunctionFromStateValidator().
- Parameters
-
planning_scene The planning scene instance to use for collision checking group The group to use for computing link transforms from joint positions collision_penalty The penalty cost value applied to colliding states
- Returns
- Cost function that computes smooth costs for colliding path segments
Definition at line 199 of file cost_functions.hpp.

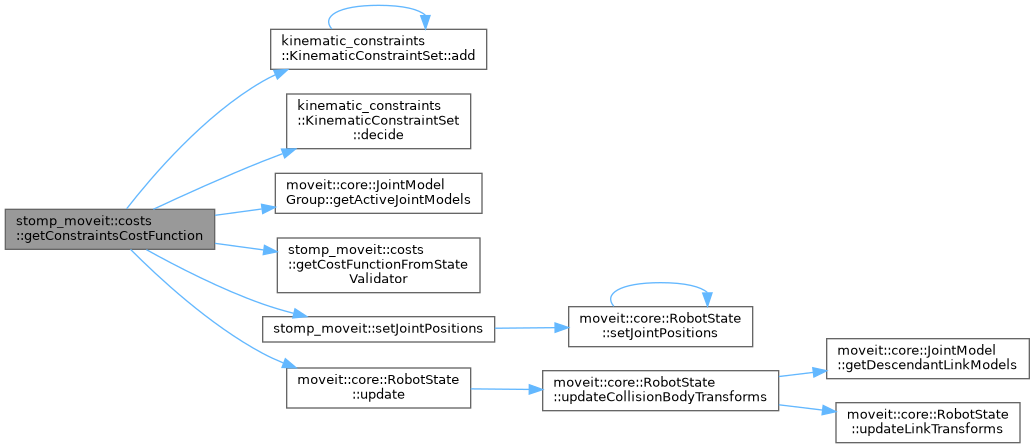
◆ getConstraintsCostFunction()
| CostFn stomp_moveit::costs::getConstraintsCostFunction | ( | const std::shared_ptr< const planning_scene::PlanningScene > & | planning_scene, |
| const moveit::core::JointModelGroup * | group, | ||
| const moveit_msgs::msg::Constraints & | constraints_msg, | ||
| double | cost_scale | ||
| ) |
Creates a cost function for binary constraint checks applied to group states. This function uses a StateValidatorFn for computing smooth penalty costs from binary constraint checks using getCostFunctionFromStateValidator().
- Parameters
-
planning_scene The planning scene instance to use for computing transforms group The group to use for computing link transforms from joint positions constraints_msg The constraints used for validating group states cost_scale A scalar factor applied to the distance cost of invalid states
- Returns
- Cost function that computes smooth costs for invalid path segments
Definition at line 230 of file cost_functions.hpp.

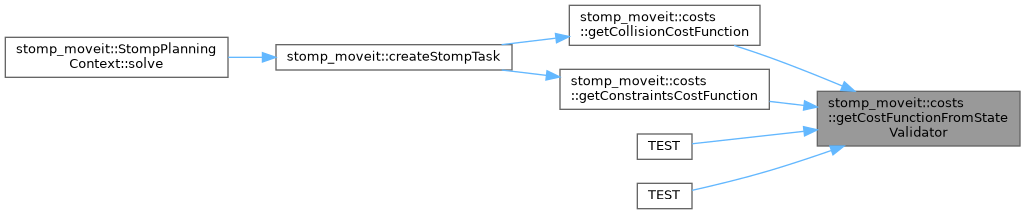
◆ getCostFunctionFromStateValidator()
| CostFn stomp_moveit::costs::getCostFunctionFromStateValidator | ( | const StateValidatorFn & | state_validator_fn, |
| double | interpolation_step_size | ||
| ) |
Creates a cost function from a robot state validation function. This is used for computing smooth cost profiles for waypoint state conditions like collision checks and constraints. The validator function is applied for all states in the validated path while also considering interpolated states. If a waypoint or an interpolated state is invalid, a local penalty is being applied to the path. Penalty costs are being smoothed out using a Gaussian so that valid neighboring states (near collisions) are optimized as well. This implementation does not support cost thresholds, non-zero local costs will render the trajectory as invalid.
- Parameters
-
state_validator_fn The validator function that produces local costs for all waypoints interpolation_step_size The L2 norm distance step used for interpolation (disabled when set to 0.0)
- Returns
- Cost function that computes smooth costs for binary validity conditions
Definition at line 76 of file cost_functions.hpp.
◆ sum()
Creates a cost function that computes the summed waypoint penalites over a vector of cost functions.
- Parameters
-
cost_functions A vector of cost functions
- Returns
- Cost function that computes the summed costs for each waypoint
Definition at line 259 of file cost_functions.hpp.

Variable Documentation
◆ COL_CHECK_DISTANCE
|
constexpr |
Definition at line 59 of file cost_functions.hpp.
◆ CONSTRAINT_CHECK_DISTANCE
|
constexpr |
Definition at line 60 of file cost_functions.hpp.