Functions | |
| FilterFn | simpleSmoothingMatrix (size_t num_timesteps) |
| FilterFn | enforcePositionBounds (const moveit::core::JointModelGroup *group) |
| FilterFn | chain (const std::vector< FilterFn > &filter_functions) |
Function Documentation
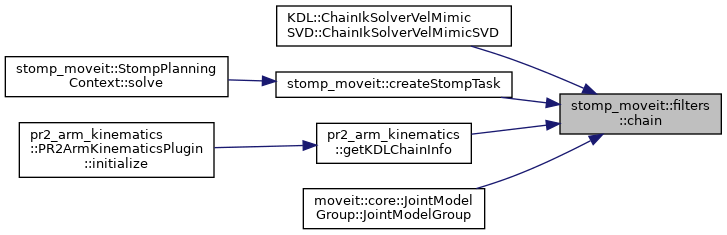
◆ chain()
Helper function for applying multiple trajectory update filters in sequential order.
- Parameters
-
filter_functions The ordered vector of filter functions to apply
- Returns
- The filter function applying all the configured filters in sequence
Definition at line 108 of file filter_functions.hpp.
Here is the caller graph for this function:
◆ enforcePositionBounds()
| FilterFn stomp_moveit::filters::enforcePositionBounds | ( | const moveit::core::JointModelGroup * | group | ) |
Creates a filter function that clips all waypoint positions using the joint bounds of a given JointModelGroup.
- Parameters
-
group The JointModelGroup providing the joint limits
- Returns
- The filter function for enforcing joint limits
Definition at line 86 of file filter_functions.hpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ simpleSmoothingMatrix()
| FilterFn stomp_moveit::filters::simpleSmoothingMatrix | ( | size_t | num_timesteps | ) |
Creates a filter function that applies Stomp's smoothing matrix for the whole trajectory.
- Parameters
-
num_timesteps The number of trajectory waypoints configured for STOMP
- Returns
- The smoothing filter function to be used for the STOMP task
Definition at line 63 of file filter_functions.hpp.
Here is the caller graph for this function:
