Public Member Functions | |
| KinematicsLoaderImpl (const rclcpp::Node::SharedPtr &node, const std::string &robot_description, const std::map< std::string, std::string > &possible_kinematics_solvers, const std::map< std::string, double > &search_res, const rclcpp::Logger &logger) | |
| Pimpl Implementation of KinematicsLoader. | |
| std::vector< std::string > | chooseTipFrames (const moveit::core::JointModelGroup *jmg) |
| Helper function to decide which, and how many, tip frames a planning group has. | |
| kinematics::KinematicsBasePtr | allocKinematicsSolver (const moveit::core::JointModelGroup *jmg) |
| kinematics::KinematicsBasePtr | allocKinematicsSolverWithCache (const moveit::core::JointModelGroup *jmg) |
| void | status () const |
Detailed Description
Definition at line 53 of file kinematics_plugin_loader.cpp.
Constructor & Destructor Documentation
◆ KinematicsLoaderImpl()
|
inline |
Pimpl Implementation of KinematicsLoader.
- Parameters
-
robot_description possible_kinematics_solvers search_res
Definition at line 62 of file kinematics_plugin_loader.cpp.
Member Function Documentation
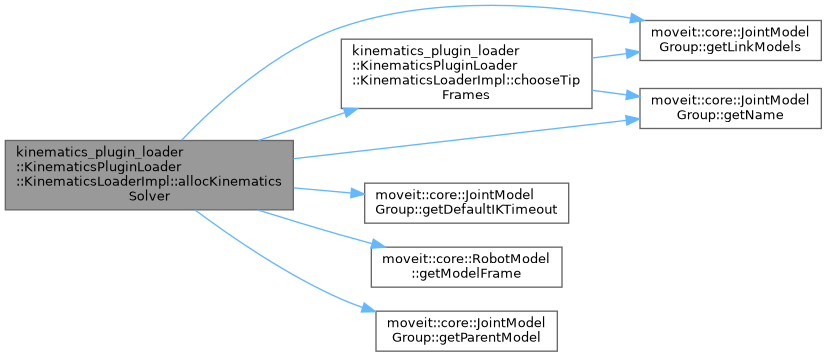
◆ allocKinematicsSolver()
|
inline |
Definition at line 115 of file kinematics_plugin_loader.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:

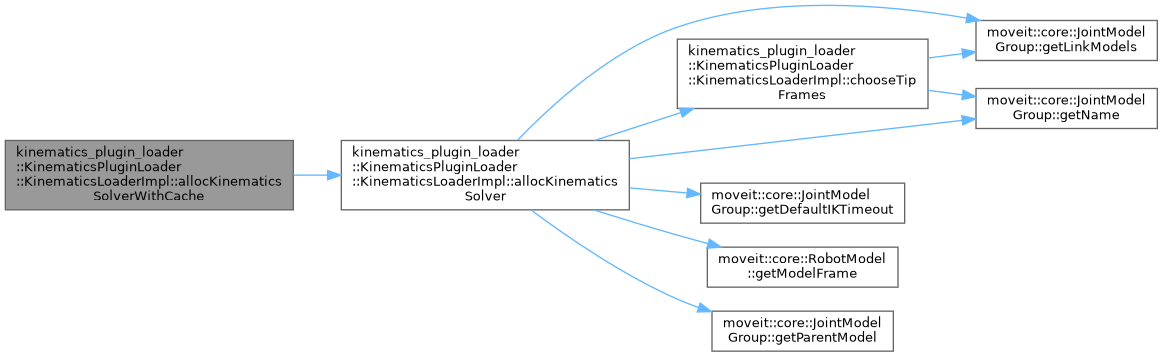
◆ allocKinematicsSolverWithCache()
|
inline |
Definition at line 196 of file kinematics_plugin_loader.cpp.
Here is the call graph for this function:
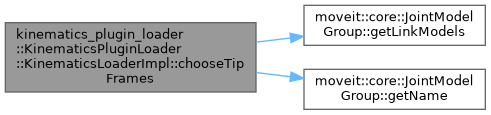
◆ chooseTipFrames()
|
inline |
Helper function to decide which, and how many, tip frames a planning group has.
- Parameters
-
jmg - joint model group pointer
- Returns
- tips - list of valid links in a planning group to plan for
Definition at line 88 of file kinematics_plugin_loader.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ status()
|
inline |
Definition at line 208 of file kinematics_plugin_loader.cpp.
The documentation for this class was generated from the following file:
- moveit_ros/planning/kinematics_plugin_loader/src/kinematics_plugin_loader.cpp