Public Member Functions | |
| __init__ (self, str robot_name, robot_description="robot_description", Optional[str] package_name=None) | |
| robot_description (self, Optional[str] file_path=None, dict[SomeSubstitutionsType, SomeSubstitutionsType] mappings=None) | |
| robot_description_semantic (self, Optional[str] file_path=None, dict[SomeSubstitutionsType, SomeSubstitutionsType] mappings=None) | |
| robot_description_kinematics (self, Optional[str] file_path=None) | |
| joint_limits (self, Optional[str] file_path=None) | |
| moveit_cpp (self, Optional[str] file_path=None) | |
| trajectory_execution (self, Optional[str] file_path=None, bool moveit_manage_controllers=True) | |
| planning_scene_monitor (self, bool publish_planning_scene=True, bool publish_geometry_updates=True, bool publish_state_updates=True, bool publish_transforms_updates=True, bool publish_robot_description=False, bool publish_robot_description_semantic=False) | |
| sensors_3d (self, Optional[str] file_path=None) | |
| planning_pipelines (self, str default_planning_pipeline=None, List[str] pipelines=None, bool load_all=True) | |
| pilz_cartesian_limits (self, Optional[str] file_path=None) | |
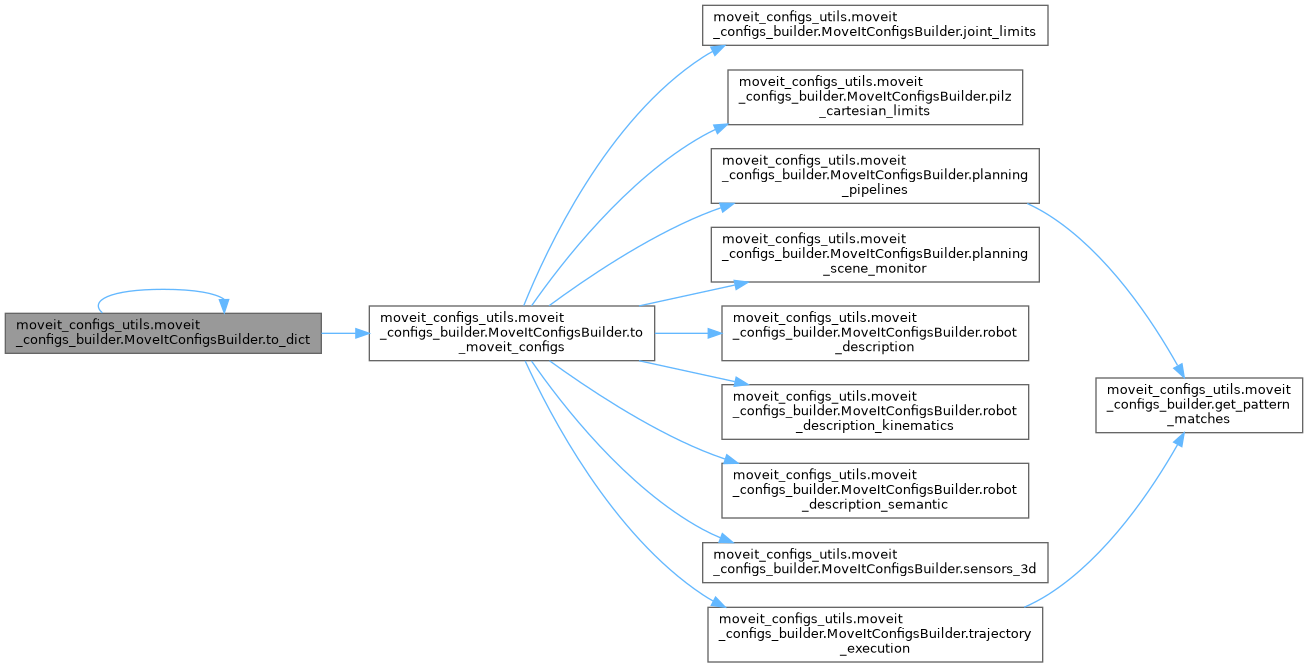
| to_moveit_configs (self) | |
| to_dict (self, bool include_moveit_configs=True) | |
Detailed Description
Definition at line 140 of file moveit_configs_builder.py.
Constructor & Destructor Documentation
◆ __init__()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.__init__ | ( | self, | |
| str | robot_name, | ||
robot_description = "robot_description", |
|||
| Optional[str] | package_name = None |
||
| ) |
Definition at line 154 of file moveit_configs_builder.py.
Member Function Documentation
◆ joint_limits()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.joint_limits | ( | self, | |
| Optional[str] | file_path = None |
||
| ) |
Load joint limits overrides. :param file_path: Absolute or relative path to the joint limits yaml file (w.r.t. robot_name_moveit_config). :return: Instance of MoveItConfigsBuilder with robot_description_planning loaded.
Definition at line 305 of file moveit_configs_builder.py.

◆ moveit_cpp()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.moveit_cpp | ( | self, | |
| Optional[str] | file_path = None |
||
| ) |
Load MoveItCpp parameters. :param file_path: Absolute or relative path to the MoveItCpp yaml file (w.r.t. robot_name_moveit_config). :return: Instance of MoveItConfigsBuilder with moveit_cpp loaded.
Definition at line 320 of file moveit_configs_builder.py.
◆ pilz_cartesian_limits()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.pilz_cartesian_limits | ( | self, | |
| Optional[str] | file_path = None |
||
| ) |
Load cartesian limits. :param file_path: Absolute or relative path to the cartesian limits file (w.r.t. robot_name_moveit_config). :return: Instance of MoveItConfigsBuilder with pilz_cartesian_limits loaded.
Definition at line 483 of file moveit_configs_builder.py.

◆ planning_pipelines()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.planning_pipelines | ( | self, | |
| str | default_planning_pipeline = None, |
||
| List[str] | pipelines = None, |
||
| bool | load_all = True |
||
| ) |
Load planning pipelines parameters.
:param default_planning_pipeline: Name of the default planning pipeline.
:param pipelines: List of the planning pipelines to be loaded.
:param load_all: Only used if pipelines is None.
If true, loads all pipelines defined in config package AND this package.
If false, only loads the pipelines defined in config package.
:return: Instance of MoveItConfigsBuilder with planning_pipelines loaded.
Definition at line 424 of file moveit_configs_builder.py.


◆ planning_scene_monitor()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.planning_scene_monitor | ( | self, | |
| bool | publish_planning_scene = True, |
||
| bool | publish_geometry_updates = True, |
||
| bool | publish_state_updates = True, |
||
| bool | publish_transforms_updates = True, |
||
| bool | publish_robot_description = False, |
||
| bool | publish_robot_description_semantic = False |
||
| ) |
Definition at line 385 of file moveit_configs_builder.py.

◆ robot_description()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.robot_description | ( | self, | |
| Optional[str] | file_path = None, |
||
| dict[SomeSubstitutionsType, SomeSubstitutionsType] | mappings = None |
||
| ) |
Load robot description. :param file_path: Absolute or relative path to the URDF file (w.r.t. robot_name_moveit_config). :param mappings: mappings to be passed when loading the xacro file. :return: Instance of MoveItConfigsBuilder with robot_description loaded.
Definition at line 213 of file moveit_configs_builder.py.

◆ robot_description_kinematics()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.robot_description_kinematics | ( | self, | |
| Optional[str] | file_path = None |
||
| ) |
Load IK solver parameters. :param file_path: Absolute or relative path to the kinematics yaml file (w.r.t. robot_name_moveit_config). :return: Instance of MoveItConfigsBuilder with robot_description_kinematics loaded.
Definition at line 290 of file moveit_configs_builder.py.

◆ robot_description_semantic()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.robot_description_semantic | ( | self, | |
| Optional[str] | file_path = None, |
||
| dict[SomeSubstitutionsType, SomeSubstitutionsType] | mappings = None |
||
| ) |
Load semantic robot description. :param file_path: Absolute or relative path to the SRDF file (w.r.t. robot_name_moveit_config). :param mappings: mappings to be passed when loading the xacro file. :return: Instance of MoveItConfigsBuilder with robot_description_semantic loaded.
Definition at line 254 of file moveit_configs_builder.py.

◆ sensors_3d()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.sensors_3d | ( | self, | |
| Optional[str] | file_path = None |
||
| ) |
Load sensors_3d parameters. :param file_path: Absolute or relative path to the sensors_3d yaml file (w.r.t. robot_name_moveit_config). :return: Instance of MoveItConfigsBuilder with robot_description_planning loaded.
Definition at line 407 of file moveit_configs_builder.py.

◆ to_dict()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.to_dict | ( | self, | |
| bool | include_moveit_configs = True |
||
| ) |
Get loaded parameters from robot_name_moveit_config as a dictionary.
:param include_moveit_configs: Whether to include the MoveIt config parameters or
only the ones from ParameterBuilder
:return: Dictionary with all parameters loaded.
Definition at line 535 of file moveit_configs_builder.py.
◆ to_moveit_configs()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.to_moveit_configs | ( | self | ) |
Get MoveIt configs from robot_name_moveit_config. :return: An MoveItConfigs instance with all parameters loaded.
Definition at line 506 of file moveit_configs_builder.py.


◆ trajectory_execution()
| moveit_configs_utils.moveit_configs_builder.MoveItConfigsBuilder.trajectory_execution | ( | self, | |
| Optional[str] | file_path = None, |
||
| bool | moveit_manage_controllers = True |
||
| ) |
Load trajectory execution and moveit controller managers' parameters :param file_path: Absolute or relative path to the controllers yaml file (w.r.t. robot_name_moveit_config). :param moveit_manage_controllers: Whether trajectory execution manager is allowed to switch controllers' states. :return: Instance of MoveItConfigsBuilder with trajectory_execution loaded.
Definition at line 332 of file moveit_configs_builder.py.


The documentation for this class was generated from the following file:
- moveit_configs_utils/moveit_configs_utils/moveit_configs_builder.py