QThread to monitor progress of the setup step. More...
#include <default_collisions_widget.hpp>
Inheritance diagram for moveit_setup::srdf_setup::MonitorThread:
Collaboration diagram for moveit_setup::srdf_setup::MonitorThread:
Signals | |
| void | progress (int) |
Public Member Functions | |
| MonitorThread (DefaultCollisions &setup_step, QProgressBar *progress_bar=nullptr) | |
| void | run () override |
| void | cancel () |
| bool | canceled () const |
Detailed Description
QThread to monitor progress of the setup step.
Definition at line 215 of file default_collisions_widget.hpp.
Constructor & Destructor Documentation
◆ MonitorThread()
| moveit_setup::srdf_setup::MonitorThread::MonitorThread | ( | DefaultCollisions & | setup_step, |
| QProgressBar * | progress_bar = nullptr |
||
| ) |
Definition at line 733 of file default_collisions_widget.cpp.
Here is the call graph for this function:

Member Function Documentation
◆ cancel()
|
inline |
Definition at line 222 of file default_collisions_widget.hpp.
◆ canceled()
|
inline |
Definition at line 226 of file default_collisions_widget.hpp.
◆ progress
|
signal |
Here is the caller graph for this function:
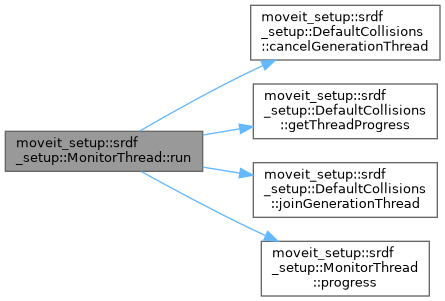
◆ run()
|
override |
Definition at line 741 of file default_collisions_widget.cpp.
Here is the call graph for this function:
The documentation for this class was generated from the following files:
- moveit_setup_assistant/moveit_setup_srdf_plugins/include/moveit_setup_srdf_plugins/default_collisions_widget.hpp
- moveit_setup_assistant/moveit_setup_srdf_plugins/src/default_collisions_widget.cpp