Functions | |
| geometry_msgs::msg::PoseStamped | poseStampedToCpp (const py::object &pose_stamped) |
| geometry_msgs::msg::Pose | poseToCpp (const py::object &pose) |
| py::object | poseToPy (geometry_msgs::msg::Pose pose) |
| geometry_msgs::msg::Point | pointToCpp (const py::object &point) |
| geometry_msgs::msg::Vector3 | vector3ToCpp (const py::object &vector3) |
| geometry_msgs::msg::Quaternion | quaternionToCpp (const py::object &quaternion) |
| shape_msgs::msg::SolidPrimitive | solidPrimitiveToCpp (const py::object &primitive) |
| shape_msgs::msg::MeshTriangle | meshTriangleToCpp (const py::object &mesh_triangle) |
| shape_msgs::msg::Mesh | meshToCpp (const py::object &mesh) |
| moveit_msgs::msg::BoundingVolume | boundingVolumeToCpp (const py::object &bounding_volume) |
| moveit_msgs::msg::JointConstraint | jointConstraintToCpp (const py::object &joint_constraint) |
| moveit_msgs::msg::PositionConstraint | positionConstraintToCpp (const py::object &position_constraint) |
| moveit_msgs::msg::OrientationConstraint | orientationConstraintToCpp (const py::object &orientation_constraint) |
| moveit_msgs::msg::VisibilityConstraint | visibilityConstraintToCpp (const py::object &visibility_constraint) |
| moveit_msgs::msg::CollisionObject | collisionObjectToCpp (const py::object &collision_object) |
| moveit_msgs::msg::Constraints | constraintsToCpp (const py::object &constraints) |
| PYBIND11_EXPORT pybind11::object | createMessage (const std::string &ros_msg_name) |
| PYBIND11_EXPORT bool | convertible (const pybind11::handle &h, const std::string &ros_msg_name) |
Function Documentation
◆ boundingVolumeToCpp()
| moveit_msgs::msg::BoundingVolume moveit_py::moveit_py_utils::boundingVolumeToCpp | ( | const py::object & | bounding_volume | ) |
Definition at line 162 of file copy_ros_msg.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ collisionObjectToCpp()
| moveit_msgs::msg::CollisionObject moveit_py::moveit_py_utils::collisionObjectToCpp | ( | const py::object & | collision_object | ) |

◆ constraintsToCpp()
| moveit_msgs::msg::Constraints moveit_py::moveit_py_utils::constraintsToCpp | ( | const py::object & | constraints | ) |

◆ convertible()
| bool moveit_py::moveit_py_utils::convertible | ( | const pybind11::handle & | h, |
| const std::string & | ros_msg_name | ||
| ) |

◆ createMessage()
| py::object moveit_py::moveit_py_utils::createMessage | ( | const std::string & | ros_msg_name | ) |
Definition at line 44 of file ros_msg_typecasters.cpp.
◆ jointConstraintToCpp()
| moveit_msgs::msg::JointConstraint moveit_py::moveit_py_utils::jointConstraintToCpp | ( | const py::object & | joint_constraint | ) |

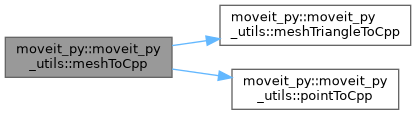
◆ meshToCpp()
| shape_msgs::msg::Mesh moveit_py::moveit_py_utils::meshToCpp | ( | const py::object & | mesh | ) |
Definition at line 144 of file copy_ros_msg.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ meshTriangleToCpp()
| shape_msgs::msg::MeshTriangle moveit_py::moveit_py_utils::meshTriangleToCpp | ( | const py::object & | mesh_triangle | ) |

◆ orientationConstraintToCpp()
| moveit_msgs::msg::OrientationConstraint moveit_py::moveit_py_utils::orientationConstraintToCpp | ( | const py::object & | orientation_constraint | ) |
Definition at line 220 of file copy_ros_msg.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ pointToCpp()
| geometry_msgs::msg::Point moveit_py::moveit_py_utils::pointToCpp | ( | const py::object & | point | ) |

◆ poseStampedToCpp()
| geometry_msgs::msg::PoseStamped moveit_py::moveit_py_utils::poseStampedToCpp | ( | const py::object & | pose_stamped | ) |
Definition at line 46 of file copy_ros_msg.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ poseToCpp()
| geometry_msgs::msg::Pose moveit_py::moveit_py_utils::poseToCpp | ( | const py::object & | pose | ) |

◆ poseToPy()
| py::object moveit_py::moveit_py_utils::poseToPy | ( | geometry_msgs::msg::Pose | pose | ) |
Definition at line 70 of file copy_ros_msg.cpp.
◆ positionConstraintToCpp()
| moveit_msgs::msg::PositionConstraint moveit_py::moveit_py_utils::positionConstraintToCpp | ( | const py::object & | position_constraint | ) |
Definition at line 207 of file copy_ros_msg.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ quaternionToCpp()
| geometry_msgs::msg::Quaternion moveit_py::moveit_py_utils::quaternionToCpp | ( | const py::object & | quaternion | ) |

◆ solidPrimitiveToCpp()
| shape_msgs::msg::SolidPrimitive moveit_py::moveit_py_utils::solidPrimitiveToCpp | ( | const py::object & | primitive | ) |

◆ vector3ToCpp()
| geometry_msgs::msg::Vector3 moveit_py::moveit_py_utils::vector3ToCpp | ( | const py::object & | vector3 | ) |

◆ visibilityConstraintToCpp()
| moveit_msgs::msg::VisibilityConstraint moveit_py::moveit_py_utils::visibilityConstraintToCpp | ( | const py::object & | visibility_constraint | ) |
Definition at line 240 of file copy_ros_msg.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:
