#include <memory>#include <gtest/gtest.h>#include <pilz_industrial_motion_planner/pilz_industrial_motion_planner.hpp>#include <pilz_industrial_motion_planner/planning_context_loader_ptp.hpp>#include <pilz_industrial_motion_planner/planning_exceptions.hpp>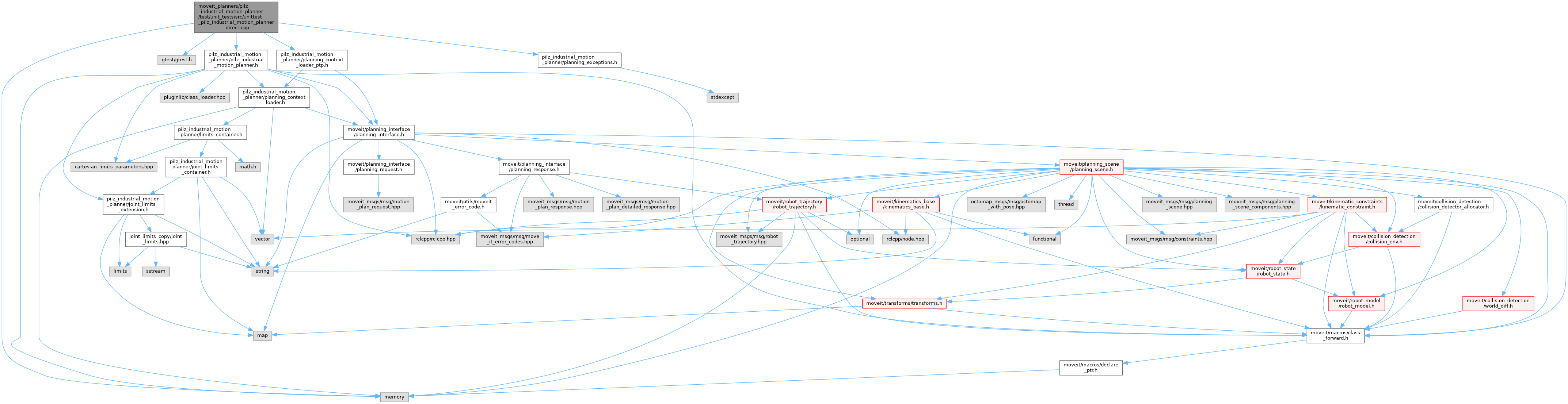
Go to the source code of this file.
Functions | |
| TEST (CommandPlannerTestDirect, ExceptionCoverage) | |
| TEST (CommandPlannerTestDirect, CheckDoubleLoadingException) | |
| Check that a exception is thrown if a already loaded PlanningContextLoader is loaded. | |
| int | main (int argc, char **argv) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 80 of file unittest_pilz_industrial_motion_planner_direct.cpp.
◆ TEST() [1/2]
| TEST | ( | CommandPlannerTestDirect | , |
| CheckDoubleLoadingException | |||
| ) |
Check that a exception is thrown if a already loaded PlanningContextLoader is loaded.
This test uses pilz_industrial_motion_planner::CommandPlanner directly and is thus separated from unittest_pilz_industrial_motion_planner.cpp since plugin loading via pluginlib does not allow loading of classes already defined.
It this point the planning_instance_ has loaded ptp, lin, circ. A additional ptp is loaded which should throw the respective exception.
Registered a found loader
Definition at line 67 of file unittest_pilz_industrial_motion_planner_direct.cpp.

◆ TEST() [2/2]
| TEST | ( | CommandPlannerTestDirect | , |
| ExceptionCoverage | |||
| ) |
Definition at line 45 of file unittest_pilz_industrial_motion_planner_direct.cpp.