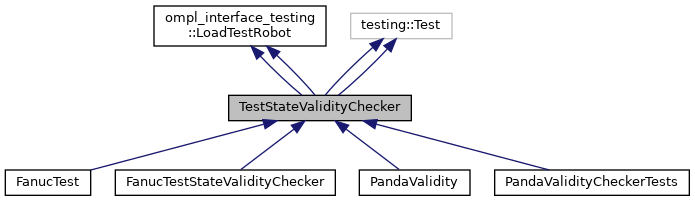
Generic implementation of the tests that can be executed on different robots.
More...
Generic implementation of the tests that can be executed on different robots.
Definition at line 88 of file test_constrained_state_validity_checker.cpp.
◆ TestStateValidityChecker() [1/2]
| TestStateValidityChecker::TestStateValidityChecker |
( |
const std::string & |
robot_name, |
|
|
const std::string & |
group_name |
|
) |
| |
|
inline |
◆ TestStateValidityChecker() [2/2]
| TestStateValidityChecker::TestStateValidityChecker |
( |
const std::string & |
robot_name, |
|
|
const std::string & |
group_name |
|
) |
| |
|
inline |
◆ createPositionConstraint()
| moveit_msgs::msg::PositionConstraint TestStateValidityChecker::createPositionConstraint |
( |
std::array< double, 3 > |
position, |
|
|
std::array< double, 3 > |
dimensions |
|
) |
| |
|
inlineprotected |
◆ SetUp() [1/2]
| void TestStateValidityChecker::SetUp |
( |
| ) |
|
|
inlineoverrideprotected |
◆ SetUp() [2/2]
| void TestStateValidityChecker::SetUp |
( |
| ) |
|
|
inlineoverrideprotected |
◆ setupPlanningContext() [1/2]
| void TestStateValidityChecker::setupPlanningContext |
( |
| ) |
|
|
inlineprotected |
◆ setupPlanningContext() [2/2]
| void TestStateValidityChecker::setupPlanningContext |
( |
| ) |
|
|
inlineprotected |
◆ setupStateSpace() [1/2]
| void TestStateValidityChecker::setupStateSpace |
( |
| ) |
|
|
inlineprotected |
◆ setupStateSpace() [2/2]
| void TestStateValidityChecker::setupStateSpace |
( |
| ) |
|
|
inlineprotected |
◆ TearDown()
| void TestStateValidityChecker::TearDown |
( |
| ) |
|
|
inlineoverrideprotected |
◆ testConstructor() [1/2]
| void TestStateValidityChecker::testConstructor |
( |
| ) |
|
|
inline |
◆ testConstructor() [2/2]
| void TestStateValidityChecker::testConstructor |
( |
| ) |
|
|
inline |
◆ testJointLimits() [1/2]
| void TestStateValidityChecker::testJointLimits |
( |
const std::vector< double > & |
position_in_limits | ) |
|
|
inline |
◆ testJointLimits() [2/2]
| void TestStateValidityChecker::testJointLimits |
( |
const std::vector< double > & |
position_in_limits | ) |
|
|
inline |
◆ testPathConstraints()
| void TestStateValidityChecker::testPathConstraints |
( |
const std::vector< double > & |
position_in_joint_limits | ) |
|
|
inline |
◆ testSelfCollision() [1/2]
| void TestStateValidityChecker::testSelfCollision |
( |
const std::vector< double > & |
position_in_self_collision | ) |
|
|
inline |
◆ testSelfCollision() [2/2]
| void TestStateValidityChecker::testSelfCollision |
( |
const std::vector< double > & |
position_in_self_collision | ) |
|
|
inline |
◆ constrained_state_space_
| ompl::base::ConstrainedStateSpacePtr TestStateValidityChecker::constrained_state_space_ |
|
protected |
◆ initial_robot_state_
| moveit::core::RobotStatePtr TestStateValidityChecker::initial_robot_state_ |
|
protected |
◆ planning_context_
| ompl_interface::ModelBasedPlanningContextPtr TestStateValidityChecker::planning_context_ |
|
protected |
◆ planning_context_spec_
◆ planning_scene_
| planning_scene::PlanningScenePtr TestStateValidityChecker::planning_scene_ |
|
protected |
◆ state_space_
| ompl_interface::ModelBasedStateSpacePtr TestStateValidityChecker::state_space_ |
|
protected |
The documentation for this class was generated from the following files:

 Protected Member Functions inherited from ompl_interface_testing::LoadTestRobot
Protected Member Functions inherited from ompl_interface_testing::LoadTestRobot






