Public Member Functions | |
| MoveItSimpleControllerManager ()=default | |
| ~MoveItSimpleControllerManager () override=default | |
| void | initialize (const rclcpp::Node::SharedPtr &node) override |
| moveit_controller_manager::MoveItControllerHandlePtr | getControllerHandle (const std::string &name) override |
| Return a given named controller. | |
| void | getControllersList (std::vector< std::string > &names) override |
| Get the list of known controller names. | |
| void | getActiveControllers (std::vector< std::string > &names) override |
| Get the list of active controllers. | |
| virtual void | getLoadedControllers (std::vector< std::string > &names) |
| void | getControllerJoints (const std::string &name, std::vector< std::string > &joints) override |
| Report the joints a controller operates on, given the controller name. | |
| moveit_controller_manager::MoveItControllerManager::ControllerState | getControllerState (const std::string &name) override |
| Report the state of a controller, given its name. | |
| bool | switchControllers (const std::vector< std::string > &, const std::vector< std::string > &) override |
| Activate and deactivate controllers. | |
 Public Member Functions inherited from moveit_controller_manager::MoveItControllerManager Public Member Functions inherited from moveit_controller_manager::MoveItControllerManager | |
| MoveItControllerManager () | |
| Default constructor. This needs to have no arguments so that the plugin system can construct the object. | |
| virtual | ~MoveItControllerManager () |
Protected Attributes | |
| rclcpp::Node::SharedPtr | node_ |
| std::map< std::string, ActionBasedControllerHandleBasePtr > | controllers_ |
| std::map< std::string, moveit_controller_manager::MoveItControllerManager::ControllerState > | controller_states_ |
Detailed Description
Definition at line 95 of file moveit_simple_controller_manager.cpp.
Constructor & Destructor Documentation
◆ MoveItSimpleControllerManager()
|
default |
◆ ~MoveItSimpleControllerManager()
|
overridedefault |
Member Function Documentation
◆ getActiveControllers()
|
inlineoverridevirtual |
Get the list of active controllers.
If there is only one controller in the system, this will be active. When multiple controllers exist, and they operate on overlapping sets of joints, not all controllers should be active at the same time.
Implements moveit_controller_manager::MoveItControllerManager.
Definition at line 281 of file moveit_simple_controller_manager.cpp.

◆ getControllerHandle()
|
inlineoverridevirtual |
Return a given named controller.
Implements moveit_controller_manager::MoveItControllerManager.
Definition at line 252 of file moveit_simple_controller_manager.cpp.
◆ getControllerJoints()
|
inlineoverridevirtual |
Report the joints a controller operates on, given the controller name.
In order to decide which controller to use, it is necessary to reason about the joints a controller operates on.
Implements moveit_controller_manager::MoveItControllerManager.
Definition at line 297 of file moveit_simple_controller_manager.cpp.
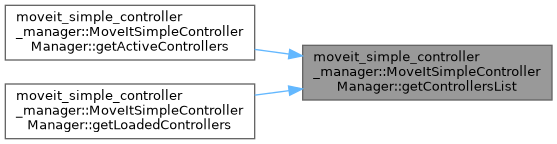
◆ getControllersList()
|
inlineoverridevirtual |
Get the list of known controller names.
Implements moveit_controller_manager::MoveItControllerManager.
Definition at line 269 of file moveit_simple_controller_manager.cpp.
◆ getControllerState()
|
inlineoverridevirtual |
Report the state of a controller, given its name.
Implements moveit_controller_manager::MoveItControllerManager.
Definition at line 315 of file moveit_simple_controller_manager.cpp.
◆ getLoadedControllers()
|
inlinevirtual |
Definition at line 289 of file moveit_simple_controller_manager.cpp.

◆ initialize()
|
inlineoverridevirtual |
Implements moveit_controller_manager::MoveItControllerManager.
Definition at line 102 of file moveit_simple_controller_manager.cpp.
◆ switchControllers()
|
inlineoverridevirtual |
Activate and deactivate controllers.
Implements moveit_controller_manager::MoveItControllerManager.
Definition at line 321 of file moveit_simple_controller_manager.cpp.
Member Data Documentation
◆ controller_states_
|
protected |
Definition at line 330 of file moveit_simple_controller_manager.cpp.
◆ controllers_
|
protected |
Definition at line 329 of file moveit_simple_controller_manager.cpp.
◆ node_
|
protected |
Definition at line 328 of file moveit_simple_controller_manager.cpp.
The documentation for this class was generated from the following file:
- moveit_plugins/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp