Orientation constraints parameterized using exponential coordinates. More...
#include <ompl_constraints.hpp>

Public Member Functions | |
| OrientationConstraint (const moveit::core::RobotModelConstPtr &robot_model, const std::string &group, const unsigned int num_dofs) | |
| void | parseConstraintMsg (const moveit_msgs::msg::Constraints &constraints) override |
| Parse bounds on orientation parameters from MoveIt's constraint message. | |
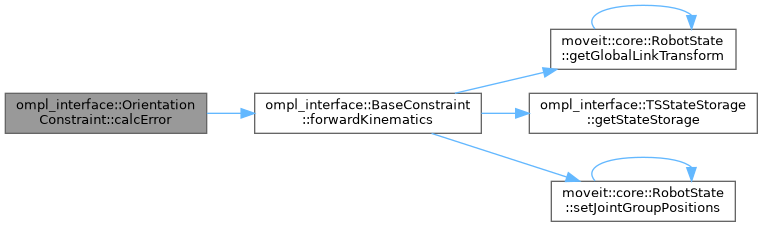
| Eigen::VectorXd | calcError (const Eigen::Ref< const Eigen::VectorXd > &x) const override |
| For inequality constraints: calculate the value of the parameter that is being constrained by the bounds. | |
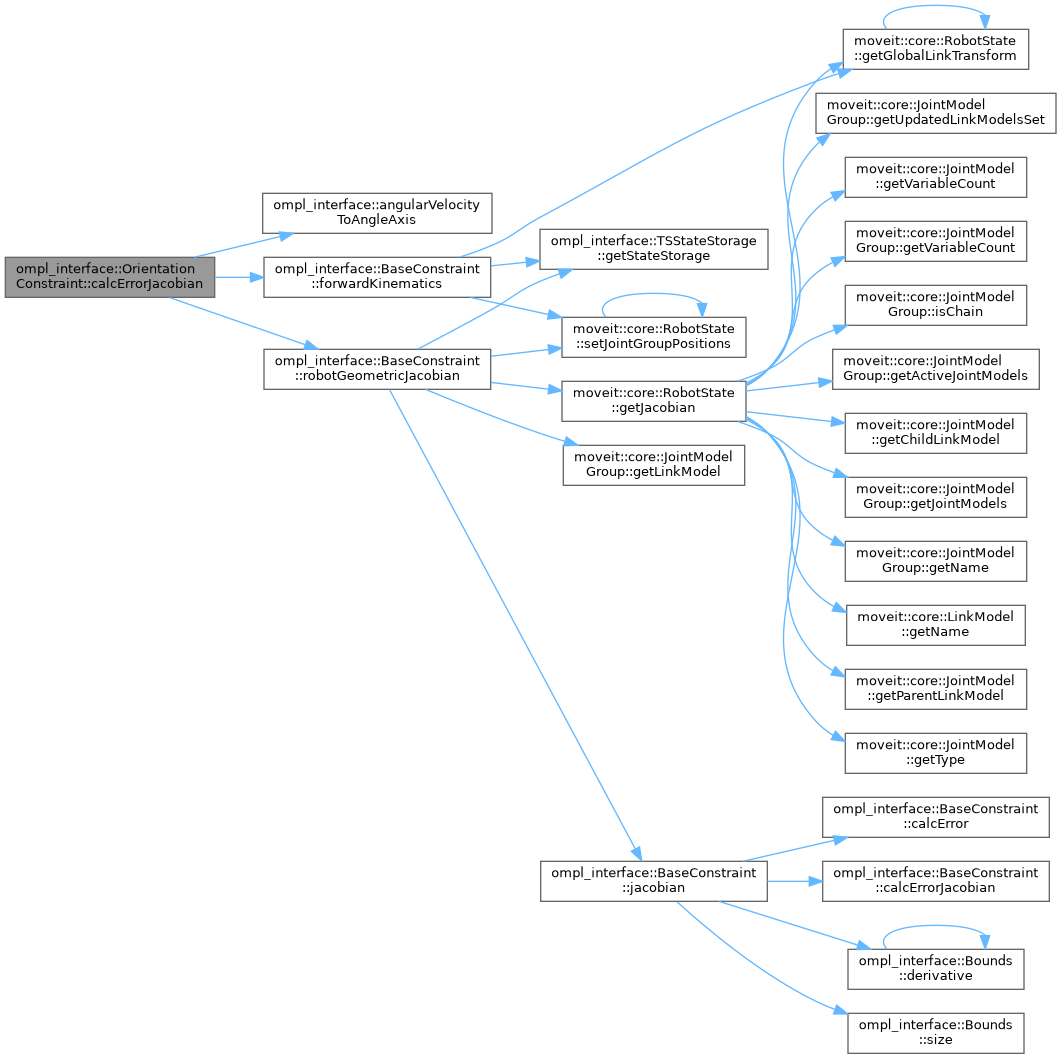
| Eigen::MatrixXd | calcErrorJacobian (const Eigen::Ref< const Eigen::VectorXd > &x) const override |
For inequality constraints: calculate the Jacobian for the current parameters that are being constrained.
| |
 Public Member Functions inherited from ompl_interface::BaseConstraint Public Member Functions inherited from ompl_interface::BaseConstraint | |
| BaseConstraint (const moveit::core::RobotModelConstPtr &robot_model, const std::string &group, const unsigned int num_dofs, const unsigned int num_cons=3) | |
Construct a BaseConstraint using 3 num_cons by default because all constraints currently implemented have 3 constraint equations. | |
| void | init (const moveit_msgs::msg::Constraints &constraints) |
| Initialize constraint based on message content. | |
| void | function (const Eigen::Ref< const Eigen::VectorXd > &joint_values, Eigen::Ref< Eigen::VectorXd > out) const override |
| void | jacobian (const Eigen::Ref< const Eigen::VectorXd > &joint_values, Eigen::Ref< Eigen::MatrixXd > out) const override |
| Jacobian of the constraint function. | |
| Eigen::Isometry3d | forwardKinematics (const Eigen::Ref< const Eigen::VectorXd > &joint_values) const |
| Wrapper for forward kinematics calculated by MoveIt's Robot State. | |
| Eigen::MatrixXd | robotGeometricJacobian (const Eigen::Ref< const Eigen::VectorXd > &joint_values) const |
| Calculate the robot's geometric Jacobian using MoveIt's Robot State. | |
| const std::string & | getLinkName () |
| const Eigen::Vector3d | getTargetPosition () |
| const Eigen::Quaterniond | getTargetOrientation () |
Additional Inherited Members | |
| Protected Attributes inherited from ompl_interface::BaseConstraint | |
| TSStateStorage | state_storage_ |
| Thread-safe storage of the robot state. | |
| const moveit::core::JointModelGroup * | joint_model_group_ |
| std::string | link_name_ |
| Robot link the constraints are applied to. | |
| Bounds | bounds_ |
| Upper and lower bounds on constrained variables. | |
| Eigen::Vector3d | target_position_ |
| target for equality constraints, nominal value for inequality constraints. | |
| Eigen::Quaterniond | target_orientation_ |
| target for equality constraints, nominal value for inequality constraints. | |
Detailed Description
Orientation constraints parameterized using exponential coordinates.
An orientation constraint is modeled as a deviation from a target orientation. The deviation is represented using exponential coordinates. A three element vector represents the rotation axis multiplied with the angle in radians around this axis.
R_error = R_end_effector ^ (-1) * R_target R_error -> rotation angle and axis (using Eigen3) error = angle * axis (vector with three elements)
And then the constraints can be written as
- absolute_x_axis_tolerance < error[0] < absolute_x_axis_tolerance
- absolute_y_axis_tolerance < error[1] < absolute_y_axis_tolerance
- absolute_z_axis_tolerance < error[2] < absolute_z_axis_tolerance
IMPORTANT It is NOT how orientation error is handled in the default MoveIt constraint samplers, where XYZ intrinsic euler angles are used. Using exponential coordinates is analog to how orientation error is calculated in the TrajOpt motion planner.
Definition at line 377 of file ompl_constraints.hpp.
Constructor & Destructor Documentation
◆ OrientationConstraint()
|
inline |
Definition at line 380 of file ompl_constraints.hpp.
Member Function Documentation
◆ calcError()
|
overridevirtual |
For inequality constraints: calculate the value of the parameter that is being constrained by the bounds.
In this orientation constraints case, it calculates the orientation of the end-effector. This error is then converted in generic equality constraints in the implementation of ompl_interface::BaseConstraint::function.
This method can be bypassed if you want to override `ompl_interfaceBaseConstraint::function directly and ignore the bounds calculation.
Reimplemented from ompl_interface::BaseConstraint.
Definition at line 319 of file ompl_constraints.cpp.
◆ calcErrorJacobian()
|
overridevirtual |
For inequality constraints: calculate the Jacobian for the current parameters that are being constrained.
- This error jacobian, as the name suggests, is only the jacobian of the position / orientation / ... error. It does not take into account the derivative of the penalty functions defined in the Bounds class. This correction is added in the implementation of of BaseConstraint::jacobian.
This method can be bypassed if you want to override `ompl_interfaceBaseConstraint::jacobian directly and ignore the bounds calculation.
TODO(jeroendm), Maybe also use an output argument as in ompl::base::Constraint::jacobian(x, out) for better performance?
Reimplemented from ompl_interface::BaseConstraint.
Definition at line 326 of file ompl_constraints.cpp.
◆ parseConstraintMsg()
|
overridevirtual |
Parse bounds on orientation parameters from MoveIt's constraint message.
This can be non-trivial given the often complex structure of these messages.
Implements ompl_interface::BaseConstraint.
Definition at line 310 of file ompl_constraints.cpp.

The documentation for this class was generated from the following files:
- moveit_planners/ompl/ompl_interface/include/moveit/ompl_interface/detail/ompl_constraints.hpp
- moveit_planners/ompl/ompl_interface/src/detail/ompl_constraints.cpp