This class orchestrates the planning of single commands and command lists. More...
#include <command_list_manager.hpp>
Public Member Functions | |
| CommandListManager (const rclcpp::Node::SharedPtr &node, const moveit::core::RobotModelConstPtr &model) | |
| RobotTrajCont | solve (const planning_scene::PlanningSceneConstPtr &planning_scene, const planning_pipeline::PlanningPipelinePtr &planning_pipeline, const moveit_msgs::msg::MotionSequenceRequest &req_list) |
| Generates trajectories for the specified list of motion commands. | |
Detailed Description
This class orchestrates the planning of single commands and command lists.
Definition at line 71 of file command_list_manager.hpp.
Constructor & Destructor Documentation
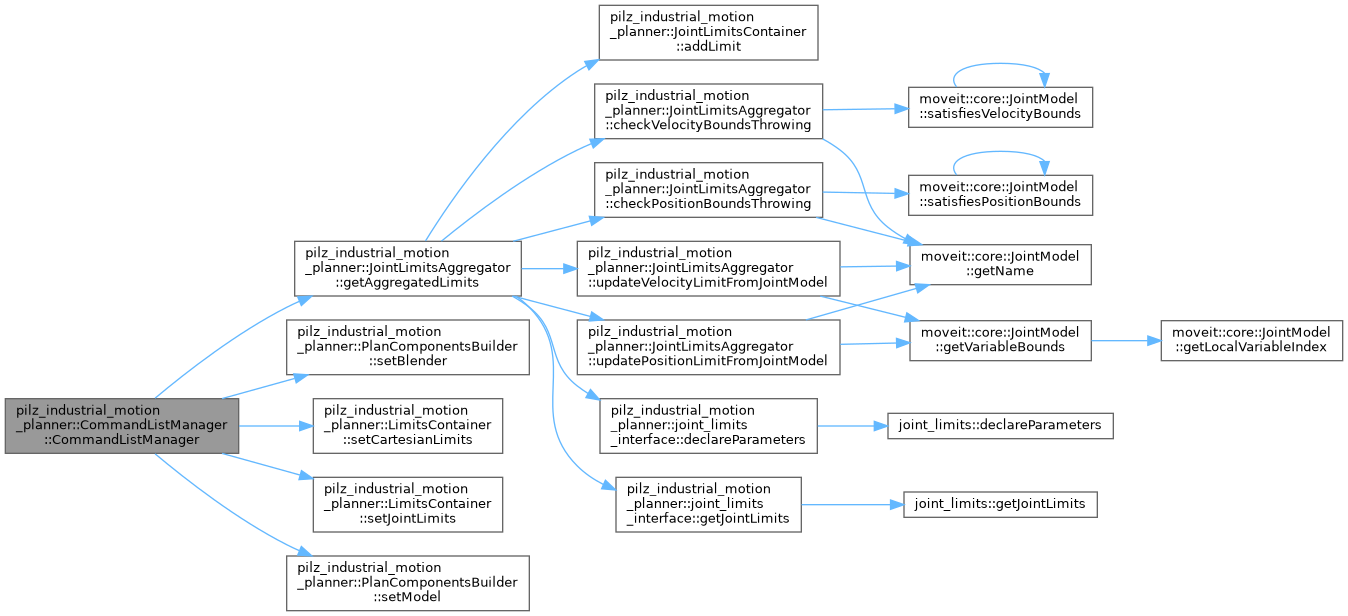
◆ CommandListManager()
| pilz_industrial_motion_planner::CommandListManager::CommandListManager | ( | const rclcpp::Node::SharedPtr & | node, |
| const moveit::core::RobotModelConstPtr & | model | ||
| ) |
Member Function Documentation
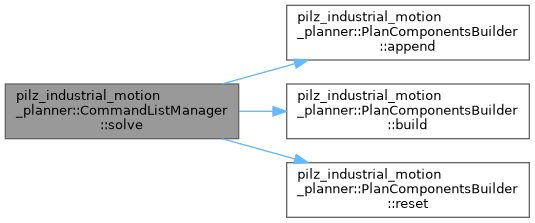
◆ solve()
| RobotTrajCont pilz_industrial_motion_planner::CommandListManager::solve | ( | const planning_scene::PlanningSceneConstPtr & | planning_scene, |
| const planning_pipeline::PlanningPipelinePtr & | planning_pipeline, | ||
| const moveit_msgs::msg::MotionSequenceRequest & | req_list | ||
| ) |
Generates trajectories for the specified list of motion commands.
The following rules apply:
- If two consecutive trajectories are from the same group, they are simply attached to each other, given that the blend_radius is zero.
- If two consecutive trajectories are from the same group, they are blended together, given that the blend_radius is GREATER than zero.
- If two consecutive trajectories are from different groups, then the second trajectory is added as new element to the result container. All following trajectories are then attached to the new trajectory element (until all requests are processed or until the next group change).
- Parameters
-
planning_scene The planning scene to be used for trajectory generation. req_list List of motion requests containing: PTP, LIN, CIRC and/or gripper commands. Please note: A request is only valid if: - All blending radii are non negative.
- The blending radius of the last request is 0.
- Only the first request of each group has a start state.
- None of the blending radii overlap with each other.
Please note: Starts states do not need to state the joints of all groups. It is sufficient if a start state states only the joints of the group which it belongs to. Starts states can even be incomplete. In this case default values are set for the unset joints.
- Returns
- Contains the calculated/generated trajectories.
Definition at line 87 of file command_list_manager.cpp.
Here is the call graph for this function:
The documentation for this class was generated from the following files:
- moveit_planners/pilz_industrial_motion_planner/include/pilz_industrial_motion_planner/command_list_manager.hpp
- moveit_planners/pilz_industrial_motion_planner/src/command_list_manager.cpp