#include <robot_interaction.hpp>
|
| static const std::string | INTERACTIVE_MARKER_TOPIC = "robot_interaction_interactive_marker_topic" |
| | The topic name on which the internal Interactive Marker Server operates.
|
| |
Definition at line 73 of file robot_interaction.hpp.
◆ RobotInteraction()
| robot_interaction::RobotInteraction::RobotInteraction |
( |
const moveit::core::RobotModelConstPtr & |
robot_model, |
|
|
const rclcpp::Node::SharedPtr & |
node, |
|
|
const std::string & |
ns = "" |
|
) |
| |
◆ ~RobotInteraction()
| robot_interaction::RobotInteraction::~RobotInteraction |
( |
| ) |
|
|
virtual |
◆ addActiveComponent()
add an interaction. An interaction is a marker that can be used to manipulate the robot state. This function does not add any markers. To add markers for all active interactions call addInteractiveMarkers(). construct - a callback to construct the marker. See comment on InteractiveMarkerConstructorFn above. update - Called when the robot state changes. Updates the marker pose. Optional. See comment on InteractiveMarkerUpdateFn above. process - called when the marker moves. Updates the robot state. See comment on ProcessFeedbackFn above.
Definition at line 112 of file robot_interaction.cpp.
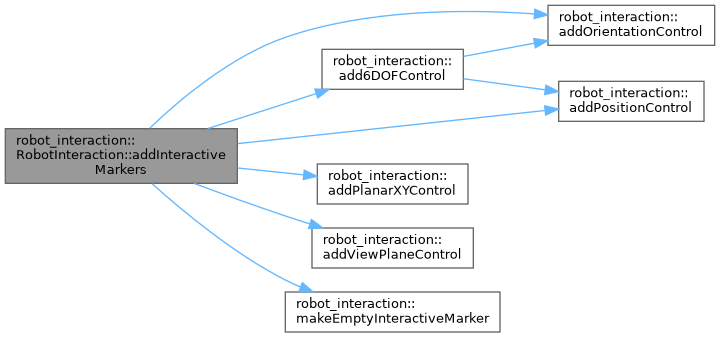
◆ addInteractiveMarkers()
| void robot_interaction::RobotInteraction::addInteractiveMarkers |
( |
const InteractionHandlerPtr & |
handler, |
|
|
const double |
marker_scale = 0.0 |
|
) |
| |
Add interactive markers for all active interactions. This adds markers just to the one handler. If there are multiple handlers call this for each handler for which you want markers. The markers are not actually added until you call publishInteractiveMarkers().
Definition at line 479 of file robot_interaction.cpp.
◆ clear()
| void robot_interaction::RobotInteraction::clear |
( |
| ) |
|
◆ clearInteractiveMarkers()
| void robot_interaction::RobotInteraction::clearInteractiveMarkers |
( |
| ) |
|
◆ decideActiveComponents() [1/2]
| void robot_interaction::RobotInteraction::decideActiveComponents |
( |
const std::string & |
group | ) |
|
Adds an interaction for:
- each end effector in the group that can be controller by IK
- each floating joint
- each planar joint If no end effector exists in the robot then adds an interaction for the last link in the chain. This function does not add any markers. To add markers for all active interactions call addInteractiveMarkers().
Definition at line 94 of file robot_interaction.cpp.
◆ decideActiveComponents() [2/2]
◆ getActiveEndEffectors()
| const std::vector< EndEffectorInteraction > & robot_interaction::RobotInteraction::getActiveEndEffectors |
( |
| ) |
const |
|
inline |
◆ getActiveJoints()
| const std::vector< JointInteraction > & robot_interaction::RobotInteraction::getActiveJoints |
( |
| ) |
const |
|
inline |
◆ getKinematicOptionsMap()
| KinematicOptionsMapPtr robot_interaction::RobotInteraction::getKinematicOptionsMap |
( |
| ) |
|
|
inline |
◆ getRobotModel()
| const moveit::core::RobotModelConstPtr & robot_interaction::RobotInteraction::getRobotModel |
( |
| ) |
const |
|
inline |
◆ getServerTopic()
| const std::string & robot_interaction::RobotInteraction::getServerTopic |
( |
| ) |
const |
|
inline |
◆ publishInteractiveMarkers()
| void robot_interaction::RobotInteraction::publishInteractiveMarkers |
( |
| ) |
|
◆ showingMarkers()
| bool robot_interaction::RobotInteraction::showingMarkers |
( |
const InteractionHandlerPtr & |
handler | ) |
|
◆ toggleMoveInteractiveMarkerTopic()
| void robot_interaction::RobotInteraction::toggleMoveInteractiveMarkerTopic |
( |
bool |
enable | ) |
|
◆ updateInteractiveMarkers()
| void robot_interaction::RobotInteraction::updateInteractiveMarkers |
( |
const InteractionHandlerPtr & |
handler | ) |
|
◆ INTERACTIVE_MARKER_TOPIC
| const std::string robot_interaction::RobotInteraction::INTERACTIVE_MARKER_TOPIC = "robot_interaction_interactive_marker_topic" |
|
static |
The topic name on which the internal Interactive Marker Server operates.
Definition at line 77 of file robot_interaction.hpp.
The documentation for this class was generated from the following files: