#include <memory>#include <string>#include <gtest/gtest.h>#include <ros/ros.h>#include <moveit/robot_model_loader/robot_model_loader.hpp>#include <moveit/robot_trajectory/robot_trajectory.hpp>#include <pilz_industrial_motion_planner/plan_components_builder.hpp>#include <pilz_industrial_motion_planner/trajectory_blender_transition_window.hpp>
Include dependency graph for integrationtest_plan_components_builder.cpp:
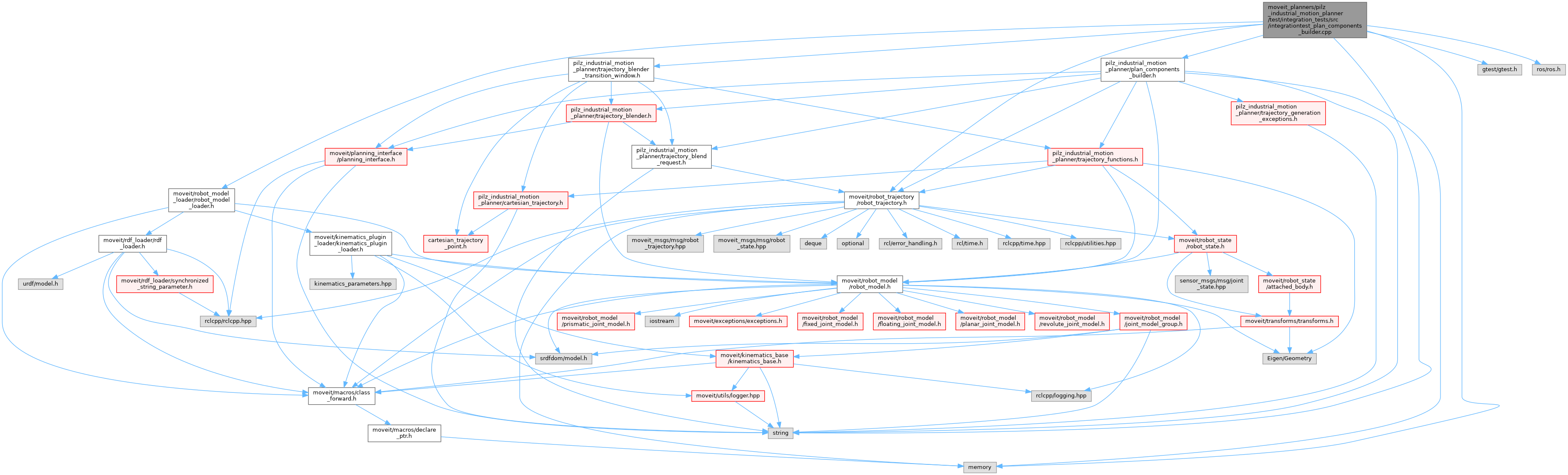
Go to the source code of this file.
Classes | |
| class | IntegrationTestPlanComponentBuilder |
Functions | |
| const std::string | PARAM_PLANNING_GROUP_NAME ("planning_group") |
| TEST_F (IntegrationTestPlanComponentBuilder, TestExceptionErrorCodeMapping) | |
| Checks that each derived MoveItErrorCodeException contains the correct error code. | |
| TEST_F (IntegrationTestPlanComponentBuilder, TestModelSet) | |
| Checks that exception is thrown if no robot model is set. | |
| TEST_F (IntegrationTestPlanComponentBuilder, TestNoBlenderSet) | |
| Checks that exception is thrown if no blender is set. | |
| int | main (int argc, char **argv) |
Variables | |
| const std::string | ROBOT_DESCRIPTION_STR { "robot_description" } |
| const std::string | EMPTY_VALUE { "" } |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 125 of file integrationtest_plan_components_builder.cpp.
◆ PARAM_PLANNING_GROUP_NAME()
| const std::string PARAM_PLANNING_GROUP_NAME | ( | "planning_group" | ) |
Here is the caller graph for this function:

◆ TEST_F() [1/3]
| TEST_F | ( | IntegrationTestPlanComponentBuilder | , |
| TestExceptionErrorCodeMapping | |||
| ) |
Checks that each derived MoveItErrorCodeException contains the correct error code.
Definition at line 83 of file integrationtest_plan_components_builder.cpp.
◆ TEST_F() [2/3]
| TEST_F | ( | IntegrationTestPlanComponentBuilder | , |
| TestModelSet | |||
| ) |
Checks that exception is thrown if no robot model is set.
Definition at line 102 of file integrationtest_plan_components_builder.cpp.
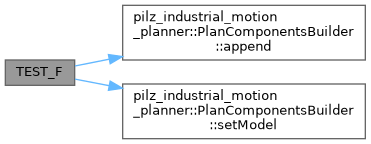
Here is the call graph for this function:

◆ TEST_F() [3/3]
| TEST_F | ( | IntegrationTestPlanComponentBuilder | , |
| TestNoBlenderSet | |||
| ) |
Checks that exception is thrown if no blender is set.
Definition at line 114 of file integrationtest_plan_components_builder.cpp.
Here is the call graph for this function:
Variable Documentation
◆ EMPTY_VALUE
| const std::string EMPTY_VALUE { "" } |
Definition at line 50 of file integrationtest_plan_components_builder.cpp.
◆ ROBOT_DESCRIPTION_STR
| const std::string ROBOT_DESCRIPTION_STR { "robot_description" } |
Definition at line 49 of file integrationtest_plan_components_builder.cpp.