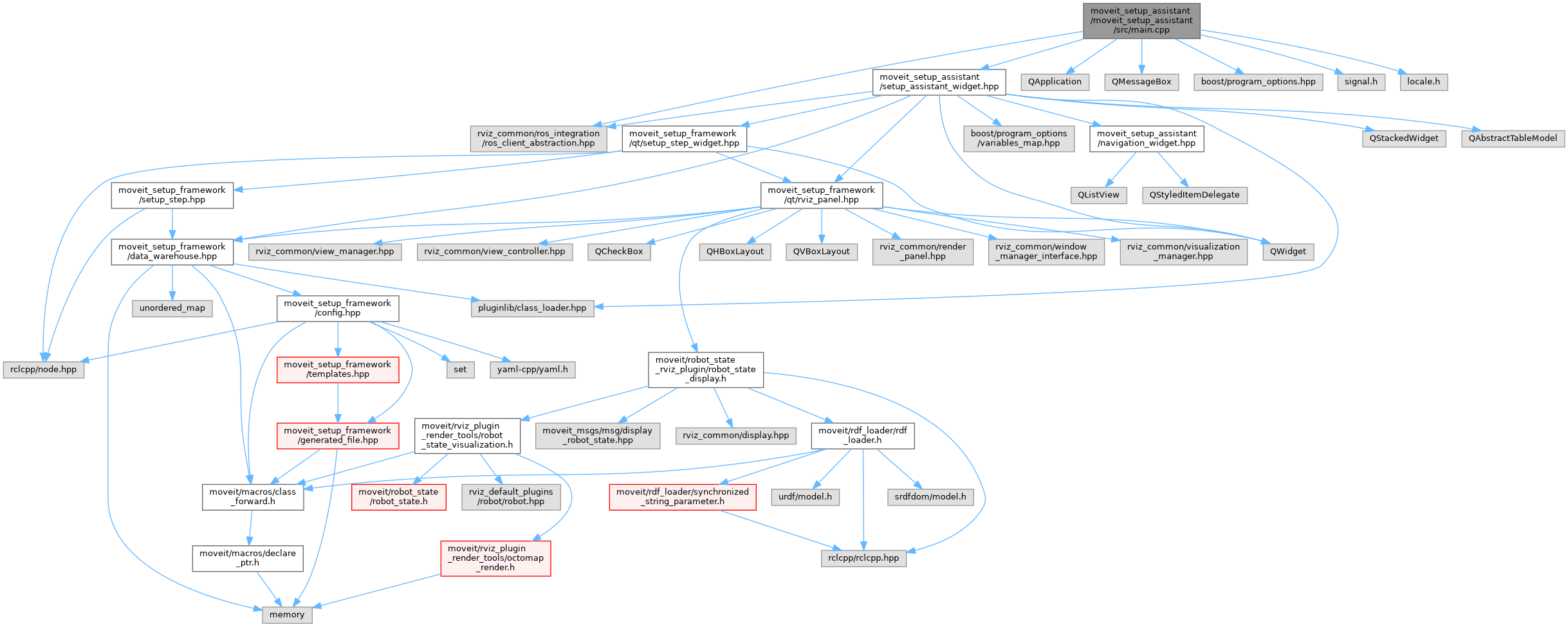
#include <moveit_setup_assistant/setup_assistant_widget.hpp>#include <rviz_common/ros_integration/ros_client_abstraction.hpp>#include <QApplication>#include <QMessageBox>#include <boost/program_options.hpp>#include <signal.h>#include <locale.h>
Include dependency graph for main.cpp:
Go to the source code of this file.
Functions | |
| void | usage (boost::program_options::options_description &desc, int exit_code) |
| int | main (int argc, char **argv) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |