Classes | |
| class | TestRobotState |
Functions | |
| get_robot_model () | |
Variables | |
| dir_path = os.path.dirname(os.path.realpath(__file__)) | |
| str | URDF_FILE = "{}/fixtures/panda.urdf".format(dir_path) |
| str | SRDF_FILE = "{}/fixtures/panda.srdf".format(dir_path) |
Function Documentation
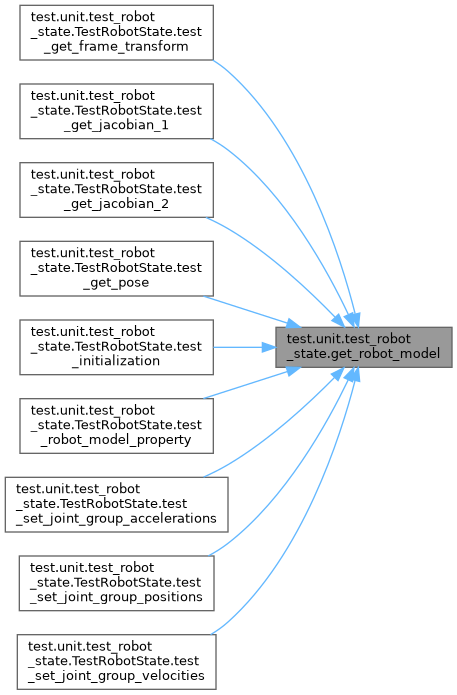
◆ get_robot_model()
| test.unit.test_robot_state.get_robot_model | ( | ) |
Helper function that returns a RobotModel instance.
Definition at line 20 of file test_robot_state.py.
Here is the caller graph for this function:
Variable Documentation
◆ dir_path
| test.unit.test_robot_state.dir_path = os.path.dirname(os.path.realpath(__file__)) |
Definition at line 15 of file test_robot_state.py.
◆ SRDF_FILE
| str test.unit.test_robot_state.SRDF_FILE = "{}/fixtures/panda.srdf".format(dir_path) |
Definition at line 17 of file test_robot_state.py.
◆ URDF_FILE
| str test.unit.test_robot_state.URDF_FILE = "{}/fixtures/panda.urdf".format(dir_path) |
Definition at line 16 of file test_robot_state.py.