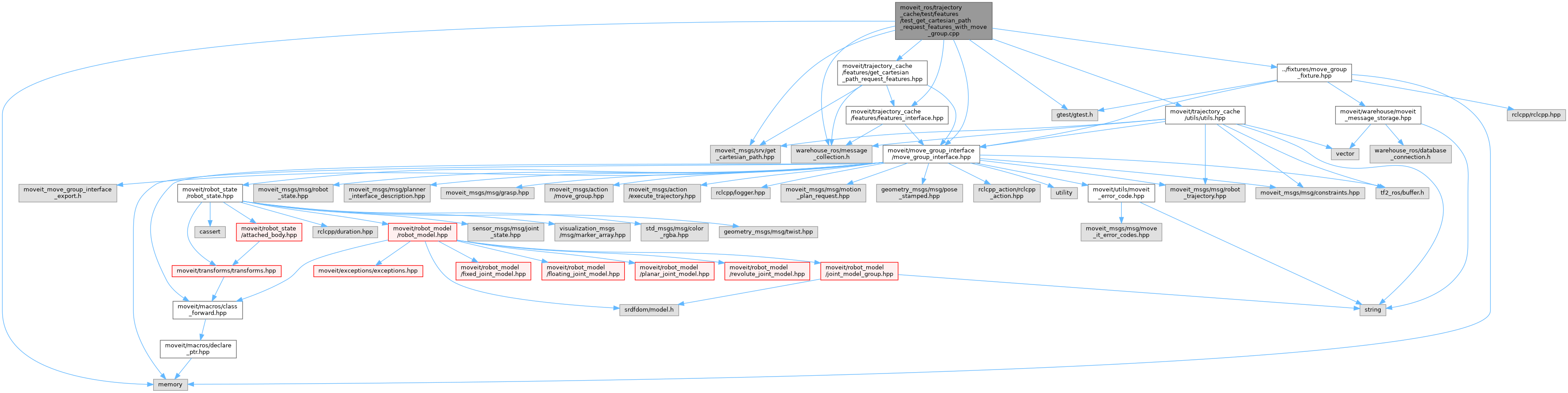
#include <memory>#include <gtest/gtest.h>#include <warehouse_ros/message_collection.h>#include <moveit/move_group_interface/move_group_interface.hpp>#include <moveit_msgs/srv/get_cartesian_path.hpp>#include <moveit/trajectory_cache/features/features_interface.hpp>#include <moveit/trajectory_cache/features/get_cartesian_path_request_features.hpp>#include <moveit/trajectory_cache/utils/utils.hpp>#include "../fixtures/move_group_fixture.hpp"
Include dependency graph for test_get_cartesian_path_request_features_with_move_group.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
Detailed Description
Sanity tests for the moveit_msgs::srv::GetCartesianPath::Request feature extractors.
WARNING: These tests currently do not cover the implementation details, they are just the first sanity check for ensuring the most basic roundtrip functionality works.
For example, some features might not have any resulting changes to the metadata or query due to the nature of what is contained in the MotionPlanRequest passed to them.
Definition in file test_get_cartesian_path_request_features_with_move_group.cpp.
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 111 of file test_get_cartesian_path_request_features_with_move_group.cpp.