A cache insertion policy that only decides to insert if the motion plan is the one with the shortest execution time seen so far amongst exactly matching MotionPlanRequests. More...
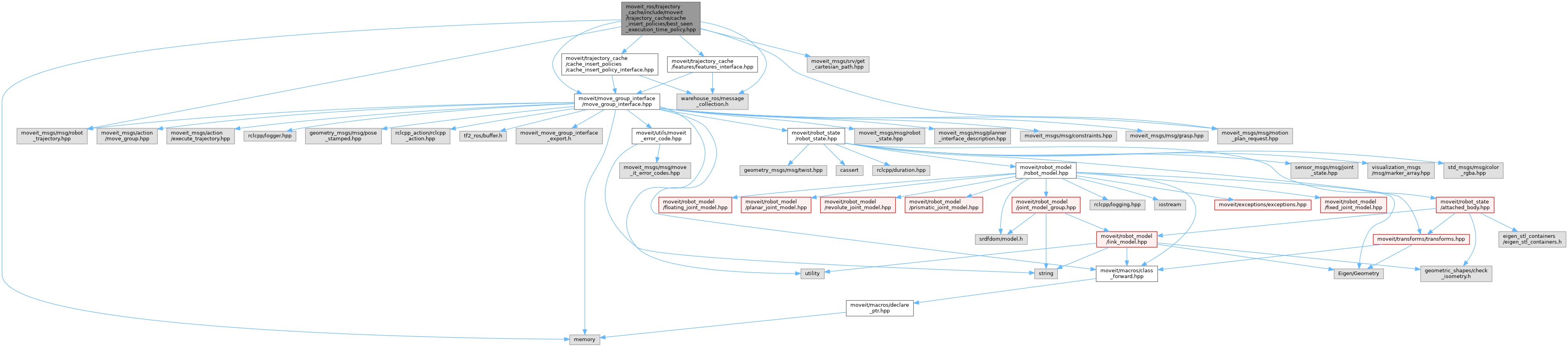
#include <memory>#include <warehouse_ros/message_collection.h>#include <moveit/move_group_interface/move_group_interface.hpp>#include <moveit_msgs/msg/motion_plan_request.hpp>#include <moveit_msgs/msg/robot_trajectory.hpp>#include <moveit_msgs/srv/get_cartesian_path.hpp>#include <moveit/trajectory_cache/cache_insert_policies/cache_insert_policy_interface.hpp>#include <moveit/trajectory_cache/features/features_interface.hpp>
Include dependency graph for best_seen_execution_time_policy.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | moveit_ros::trajectory_cache::BestSeenExecutionTimePolicy |
| A cache insertion policy that only decides to insert if the motion plan is the one with the shortest execution time seen so far amongst exactly matching MotionPlanRequests. More... | |
| class | moveit_ros::trajectory_cache::CartesianBestSeenExecutionTimePolicy |
| A cache insertion policy that only decides to insert if the motion plan is the one with the shortest execution time seen so far amongst exactly matching GetCartesianPath requests. More... | |
Namespaces | |
| namespace | moveit_ros |
| namespace | moveit_ros::trajectory_cache |
Detailed Description
A cache insertion policy that only decides to insert if the motion plan is the one with the shortest execution time seen so far amongst exactly matching MotionPlanRequests.
Definition in file best_seen_execution_time_policy.hpp.