#include <hybrid_planning_manager.hpp>
Public Member Functions | |
| HybridPlanningManager (const rclcpp::NodeOptions &options) | |
| Constructor. | |
| ~HybridPlanningManager () | |
| Destructor. | |
| bool | initialize () |
| rclcpp::node_interfaces::NodeBaseInterface::SharedPtr | get_node_base_interface () |
| void | cancelHybridManagerGoals () noexcept |
| void | executeHybridPlannerGoal (std::shared_ptr< rclcpp_action::ServerGoalHandle< moveit_msgs::action::HybridPlanner > > goal_handle) |
| bool | sendGlobalPlannerAction () |
| bool | sendLocalPlannerAction () |
| void | sendHybridPlanningResponse (bool success) |
| void | processReactionResult (const ReactionResult &result) |
| Process the action result and do an action call if necessary. | |
Detailed Description
Class HybridPlanningManager - ROS 2 component node that implements the hybrid planning manager.
Definition at line 57 of file hybrid_planning_manager.hpp.
Constructor & Destructor Documentation
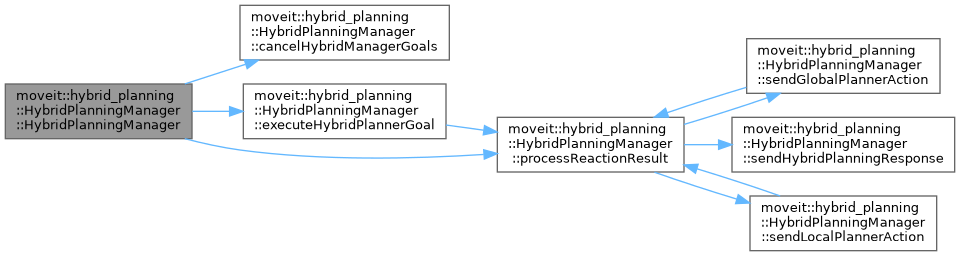
◆ HybridPlanningManager()
| moveit::hybrid_planning::HybridPlanningManager::HybridPlanningManager | ( | const rclcpp::NodeOptions & | options | ) |
Constructor.
Definition at line 52 of file hybrid_planning_manager.cpp.
◆ ~HybridPlanningManager()
|
inline |
Destructor.
Definition at line 64 of file hybrid_planning_manager.hpp.
Member Function Documentation
◆ cancelHybridManagerGoals()
|
noexcept |
Cancel any active action goals, including global and local planners
Definition at line 138 of file hybrid_planning_manager.cpp.

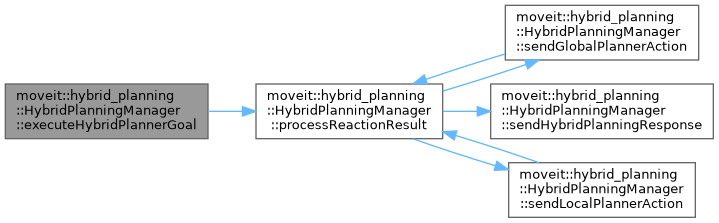
◆ executeHybridPlannerGoal()
| void moveit::hybrid_planning::HybridPlanningManager::executeHybridPlannerGoal | ( | std::shared_ptr< rclcpp_action::ServerGoalHandle< moveit_msgs::action::HybridPlanner > > | goal_handle | ) |
This handles execution of a hybrid planning goal in a new thread, to avoid blocking the executor.
- Parameters
-
goal_handle The action server goal
Definition at line 152 of file hybrid_planning_manager.cpp.

◆ get_node_base_interface()
|
inline |
Definition at line 81 of file hybrid_planning_manager.hpp.
◆ initialize()
| bool moveit::hybrid_planning::HybridPlanningManager::initialize | ( | ) |
Load and initialized planner logic plugin and ROS 2 action and topic interfaces
- Returns
- Initialization successful yes/no
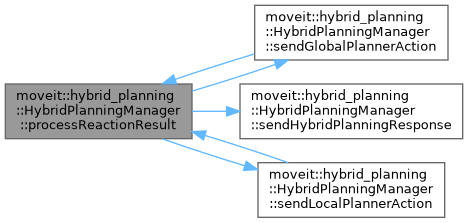
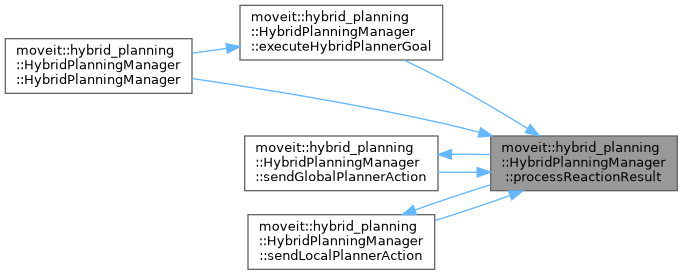
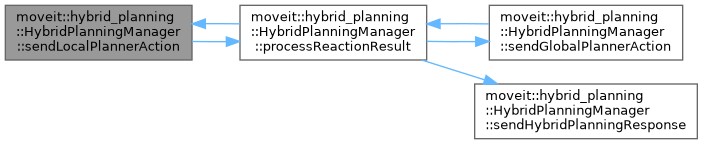
◆ processReactionResult()
| void moveit::hybrid_planning::HybridPlanningManager::processReactionResult | ( | const ReactionResult & | result | ) |
Process the action result and do an action call if necessary.
- Parameters
-
result Result to an event
Definition at line 303 of file hybrid_planning_manager.cpp.
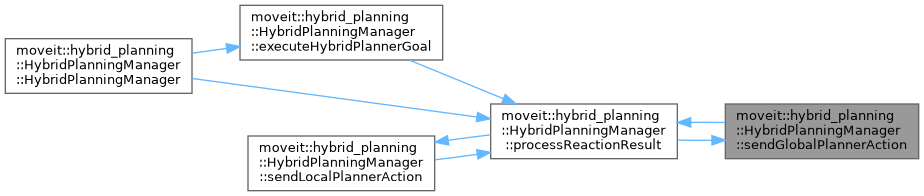
◆ sendGlobalPlannerAction()
| bool moveit::hybrid_planning::HybridPlanningManager::sendGlobalPlannerAction | ( | ) |
Send global planning request to global planner component
- Returns
- Global planner successfully started yes/no
Definition at line 165 of file hybrid_planning_manager.cpp.

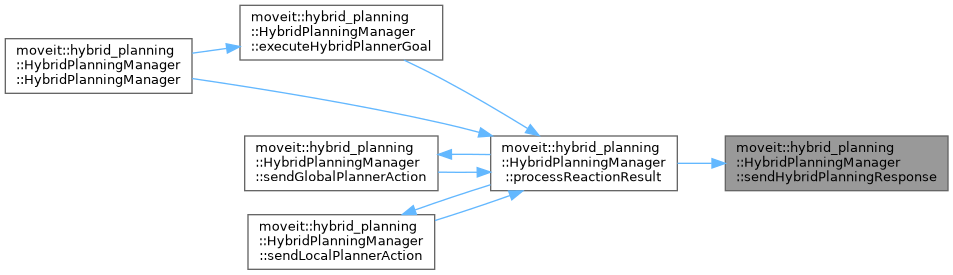
◆ sendHybridPlanningResponse()
| void moveit::hybrid_planning::HybridPlanningManager::sendHybridPlanningResponse | ( | bool | success | ) |
Send back hybrid planning response
- Parameters
-
success Indicates whether hybrid planning was successful
Definition at line 287 of file hybrid_planning_manager.cpp.
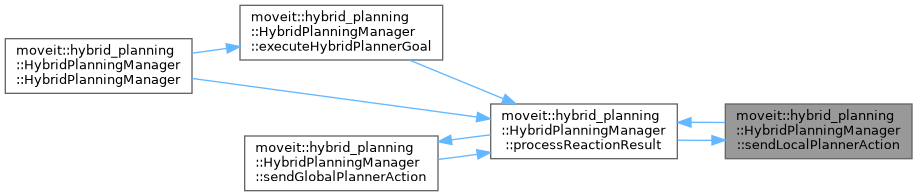
◆ sendLocalPlannerAction()
| bool moveit::hybrid_planning::HybridPlanningManager::sendLocalPlannerAction | ( | ) |
Send local planning request to local planner component
- Returns
- Local planner successfully started yes/no
Definition at line 224 of file hybrid_planning_manager.cpp.
The documentation for this class was generated from the following files:
- moveit_ros/hybrid_planning/hybrid_planning_manager/hybrid_planning_manager_component/include/moveit/hybrid_planning_manager/hybrid_planning_manager.hpp
- moveit_ros/hybrid_planning/hybrid_planning_manager/hybrid_planning_manager_component/src/hybrid_planning_manager.cpp