#include <action_based_controller_handle.hpp>
Public Member Functions | |
| ActionBasedControllerHandleBase (const std::string &name, const std::string &logger_name) | |
| virtual void | addJoint (const std::string &name)=0 |
| virtual void | getJoints (std::vector< std::string > &joints)=0 |
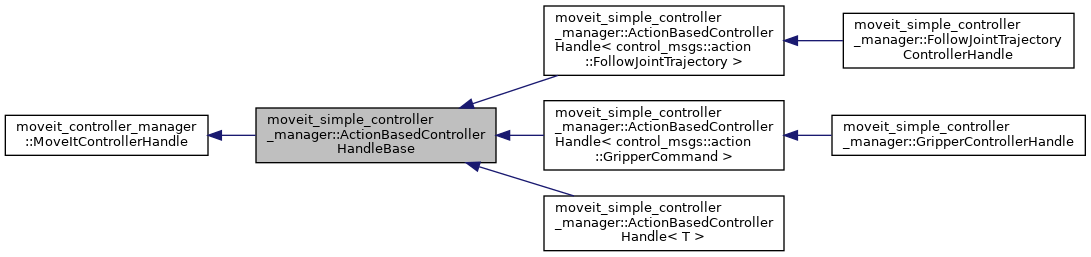
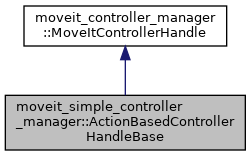
 Public Member Functions inherited from moveit_controller_manager::MoveItControllerHandle Public Member Functions inherited from moveit_controller_manager::MoveItControllerHandle | |
| MoveItControllerHandle (const std::string &name) | |
| Each controller has a name. The handle is initialized with that name. | |
| virtual | ~MoveItControllerHandle () |
| const std::string & | getName () const |
| Get the name of the controller this handle can send commands to. | |
| virtual bool | sendTrajectory (const moveit_msgs::msg::RobotTrajectory &trajectory)=0 |
| Send a trajectory to the controller. | |
| virtual bool | cancelExecution ()=0 |
| Cancel the execution of any motion using this controller. | |
| virtual bool | waitForExecution (const rclcpp::Duration &timeout=rclcpp::Duration::from_nanoseconds(-1))=0 |
| Wait for the current execution to complete, or until the timeout is reached. | |
| virtual ExecutionStatus | getLastExecutionStatus ()=0 |
| Return the execution status of the last trajectory sent to the controller. | |
Protected Attributes | |
| const rclcpp::Logger | logger_ |
| Protected Attributes inherited from moveit_controller_manager::MoveItControllerHandle | |
| std::string | name_ |
Detailed Description
Definition at line 53 of file action_based_controller_handle.hpp.
Constructor & Destructor Documentation
◆ ActionBasedControllerHandleBase()
|
inline |
Definition at line 56 of file action_based_controller_handle.hpp.
Member Function Documentation
◆ addJoint()
|
pure virtual |
Implemented in moveit_simple_controller_manager::ActionBasedControllerHandle< T >, moveit_simple_controller_manager::ActionBasedControllerHandle< control_msgs::action::FollowJointTrajectory >, moveit_simple_controller_manager::ActionBasedControllerHandle< control_msgs::action::GripperCommand >, and moveit_simple_controller_manager::ActionBasedControllerHandle< control_msgs::action::ParallelGripperCommand >.
◆ getJoints()
|
pure virtual |
Implemented in moveit_simple_controller_manager::ActionBasedControllerHandle< T >, moveit_simple_controller_manager::ActionBasedControllerHandle< control_msgs::action::FollowJointTrajectory >, moveit_simple_controller_manager::ActionBasedControllerHandle< control_msgs::action::GripperCommand >, and moveit_simple_controller_manager::ActionBasedControllerHandle< control_msgs::action::ParallelGripperCommand >.
Member Data Documentation
◆ logger_
|
protected |
Definition at line 69 of file action_based_controller_handle.hpp.
The documentation for this class was generated from the following file:
- moveit_plugins/moveit_simple_controller_manager/include/moveit_simple_controller_manager/action_based_controller_handle.hpp