Unifies the joint limits from the given joint models with joint limits from the node parameters. More...
#include <joint_limits_aggregator.hpp>
Static Public Member Functions | |
| static JointLimitsContainer | getAggregatedLimits (const rclcpp::Node::SharedPtr &node, const std::string ¶m_namespace, const std::vector< const moveit::core::JointModel * > &joint_models) |
| Aggregates(combines) the joint limits from joint model and node parameters. The rules for the combination are: | |
Static Protected Member Functions | |
| static void | updatePositionLimitFromJointModel (const moveit::core::JointModel *joint_model, JointLimit &joint_limit) |
| Update the position limits with the ones from the joint_model. | |
| static void | updateVelocityLimitFromJointModel (const moveit::core::JointModel *joint_model, JointLimit &joint_limit) |
| Update the velocity limit with the one from the joint_model. | |
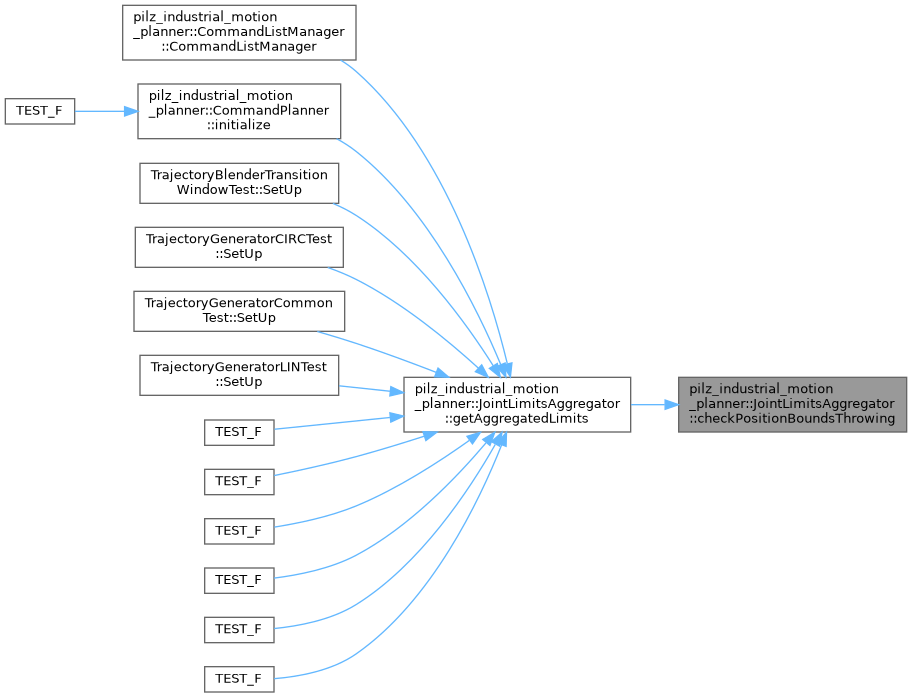
| static void | checkPositionBoundsThrowing (const moveit::core::JointModel *joint_model, const JointLimit &joint_limit) |
| Checks if the position limits from the given joint_limit are stricter than the limits of the joint_model. Throws AggregationBoundsViolationException on violation. | |
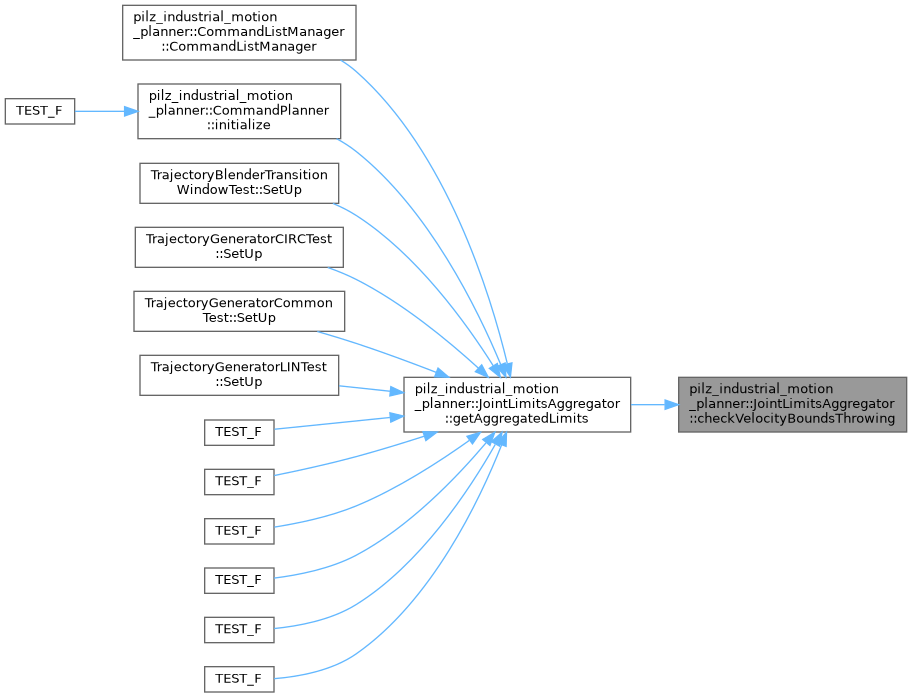
| static void | checkVelocityBoundsThrowing (const moveit::core::JointModel *joint_model, const JointLimit &joint_limit) |
| Checks if the velocity limit from the given joint_limit are stricter than the limit of the joint_model. Throws AggregationBoundsViolationException on violation. | |
Detailed Description
Unifies the joint limits from the given joint models with joint limits from the node parameters.
Does not support MultiDOF joints.
Definition at line 56 of file joint_limits_aggregator.hpp.
Member Function Documentation
◆ checkPositionBoundsThrowing()
|
staticprotected |
Checks if the position limits from the given joint_limit are stricter than the limits of the joint_model. Throws AggregationBoundsViolationException on violation.
- Parameters
-
joint_model The joint_model joint_limit The joint_limit
Definition at line 168 of file joint_limits_aggregator.cpp.
◆ checkVelocityBoundsThrowing()
|
staticprotected |
Checks if the velocity limit from the given joint_limit are stricter than the limit of the joint_model. Throws AggregationBoundsViolationException on violation.
- Parameters
-
joint_model The joint_model joint_limit The joint_limit
Definition at line 186 of file joint_limits_aggregator.cpp.
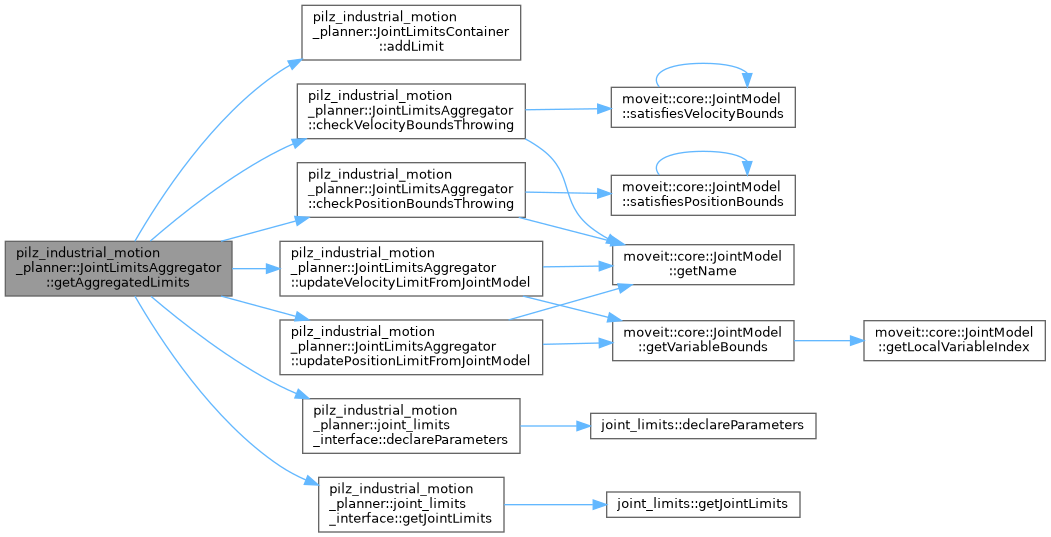
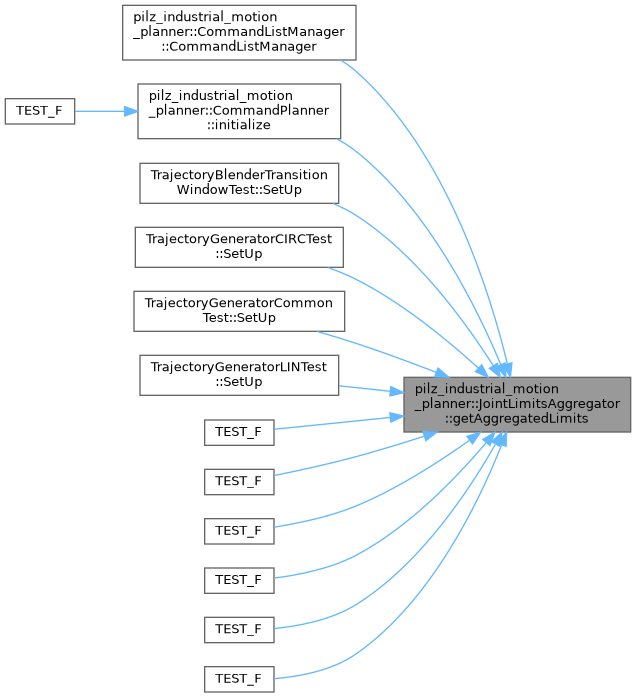
◆ getAggregatedLimits()
|
static |
Aggregates(combines) the joint limits from joint model and node parameters. The rules for the combination are:
- Position and velocity limits in the node parameters must be stricter or equal if they are defined.
- Limits in the node parameters where the corresponding has_<position|velocity|acceleration|deceleration>_limits are „false“ are considered undefined(see point 1).
- Not all joints have to be limited by the node parameters. Selective limitation is possible.
- If max_deceleration is unset, it will be set to: max_deceleration = - max_acceleration.
- Note
- The acceleration/deceleration can only be set via the node parameters parameter since they are not supported in the urdf so far.
- Parameters
-
node Node to use for accessing joint limit parameters param_namespace Namespace to use for looking up node parameters joint_models The joint models
- Returns
- Container containing the limits
Definition at line 52 of file joint_limits_aggregator.cpp.
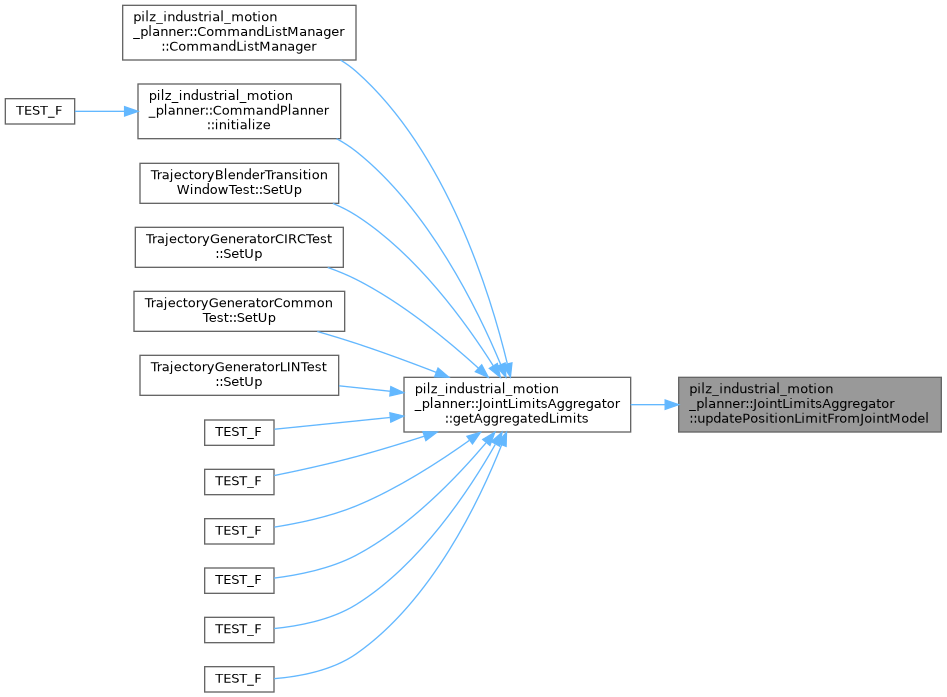
◆ updatePositionLimitFromJointModel()
|
staticprotected |
Update the position limits with the ones from the joint_model.
If the joint model has no position limit, the value is unchanged.
- Parameters
-
joint_model The joint model joint_limit The joint_limit to be filled with new values.
Definition at line 115 of file joint_limits_aggregator.cpp.

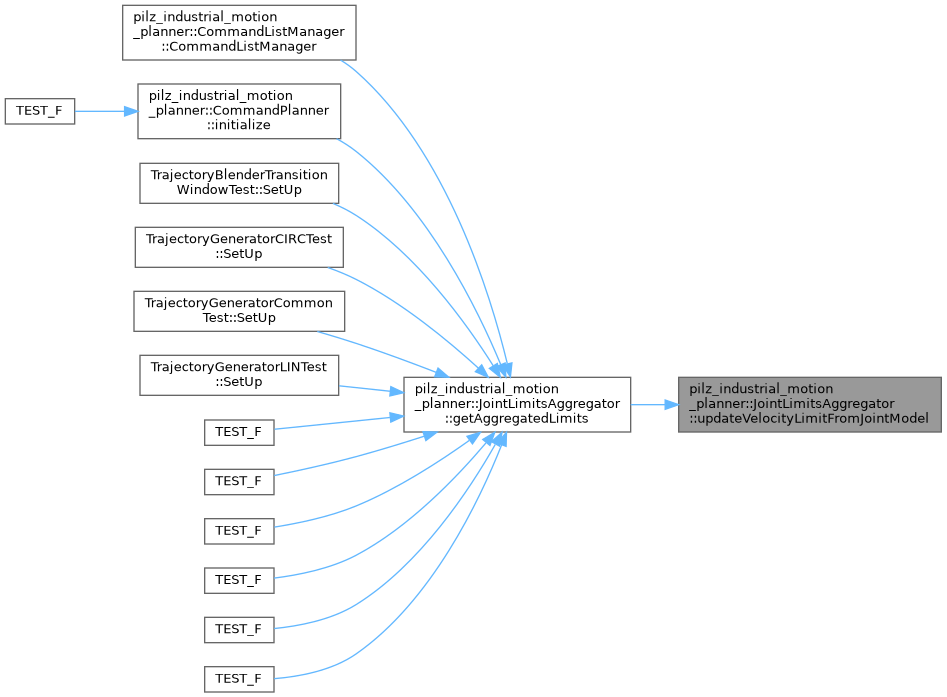
◆ updateVelocityLimitFromJointModel()
|
staticprotected |
Update the velocity limit with the one from the joint_model.
If the joint model has no velocity limit, the value is unchanged.
- Parameters
-
joint_model The joint model joint_limit The joint_limit to be filled with new values.
Definition at line 144 of file joint_limits_aggregator.cpp.

The documentation for this class was generated from the following files:
- moveit_planners/pilz_industrial_motion_planner/include/pilz_industrial_motion_planner/joint_limits_aggregator.hpp
- moveit_planners/pilz_industrial_motion_planner/src/joint_limits_aggregator.cpp