#include <ruckig_traj_smoothing.hpp>
Static Public Member Functions | |
| static bool | applySmoothing (robot_trajectory::RobotTrajectory &trajectory, const double max_velocity_scaling_factor=1.0, const double max_acceleration_scaling_factor=1.0, const bool mitigate_overshoot=false, const double overshoot_threshold=0.01) |
| Apply smoothing to a time-parameterized trajectory so that jerk limits are not violated. | |
| static bool | applySmoothing (robot_trajectory::RobotTrajectory &trajectory, const std::unordered_map< std::string, double > &velocity_limits, const std::unordered_map< std::string, double > &acceleration_limits, const std::unordered_map< std::string, double > &jerk_limits, const double max_velocity_scaling_factor=1.0, const double max_acceleration_scaling_factor=1.0, const bool mitigate_overshoot=false, const double overshoot_threshold=0.01) |
| Apply smoothing to a time-parameterized trajectory so that jerk limits are not violated. | |
| static bool | applySmoothing (robot_trajectory::RobotTrajectory &trajectory, const std::vector< moveit_msgs::msg::JointLimits > &joint_limits, const double max_velocity_scaling_factor=1.0, const double max_acceleration_scaling_factor=1.0) |
| Apply smoothing to a time-parameterized trajectory so that jerk limits are not violated. | |
Detailed Description
Definition at line 45 of file ruckig_traj_smoothing.hpp.
Member Function Documentation
◆ applySmoothing() [1/3]
|
static |
Apply smoothing to a time-parameterized trajectory so that jerk limits are not violated.
- Parameters
-
[in,out] trajectory A path which needs smoothing. max_velocity_scaling_factor A factor in the range [0,1] which can slow down the trajectory. max_acceleration_scaling_factor A factor in the range [0,1] which can slow down the trajectory. mitigate_overshoot If true, overshoot is mitigated by extending trajectory duration. overshoot_threshold If an overshoot is greater than this, duration is extended (radians, for a single joint)
- Returns
- true if successful.
Definition at line 64 of file ruckig_traj_smoothing.cpp.
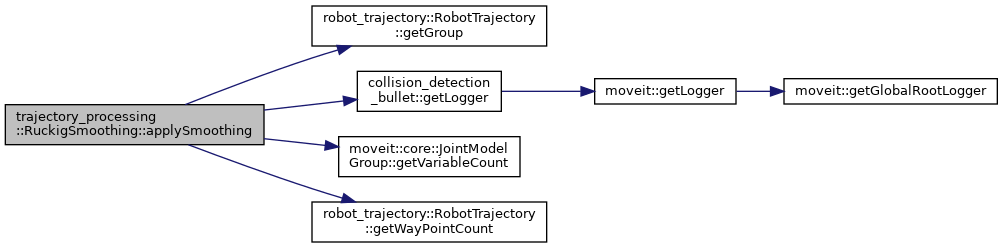
Here is the call graph for this function:
Here is the caller graph for this function:

◆ applySmoothing() [2/3]
|
static |
Apply smoothing to a time-parameterized trajectory so that jerk limits are not violated.
- Parameters
-
[in,out] trajectory A path which needs smoothing. velocity_limits Joint names and velocity limits in rad/s acceleration_limits Joint names and acceleration limits in rad/s^2 jerk_limits Joint names and jerk limits in rad/s^3 max_velocity_scaling_factor A factor in the range [0,1] which can slow down the trajectory. max_acceleration_scaling_factor A factor in the range [0,1] which can slow down the trajectory. mitigate_overshoot If true, overshoot is mitigated by extending trajectory duration. overshoot_threshold If an overshoot is greater than this, duration is extended (radians, for a single joint)
- Returns
- true if successful.
Definition at line 95 of file ruckig_traj_smoothing.cpp.
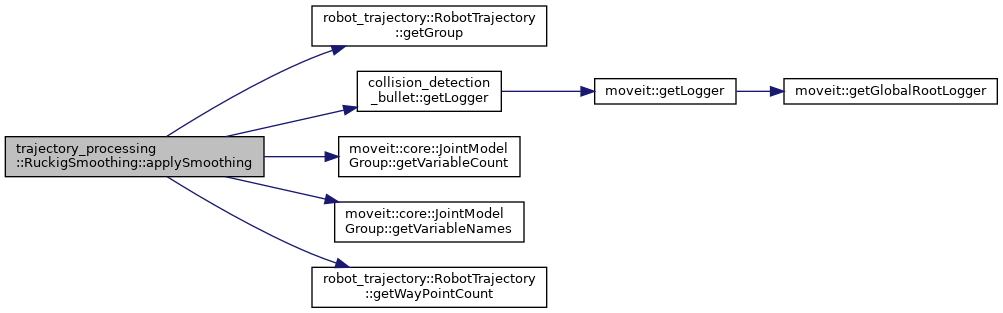
Here is the call graph for this function:
◆ applySmoothing() [3/3]
|
static |
Apply smoothing to a time-parameterized trajectory so that jerk limits are not violated.
- Parameters
-
[in,out] trajectory A path which needs smoothing. joint_limits Joint names and corresponding velocity limits in rad/s, acceleration limits in rad/s^2, and jerk limits in rad/s^3 max_velocity_scaling_factor A factor in the range [0,1] which can slow down the trajectory. max_acceleration_scaling_factor A factor in the range [0,1] which can slow down the trajectory.
Definition at line 154 of file ruckig_traj_smoothing.cpp.
Here is the call graph for this function:

The documentation for this class was generated from the following files:
- moveit_core/trajectory_processing/include/moveit/trajectory_processing/ruckig_traj_smoothing.hpp
- moveit_core/trajectory_processing/src/ruckig_traj_smoothing.cpp