Classes | |
| class | CircularPathSegment |
| class | LinearPathSegment |
| class | Path |
| class | PathSegment |
| class | RuckigSmoothing |
| class | TimeOptimalTrajectoryGeneration |
| class | TimeParameterization |
| class | Trajectory |
Enumerations | |
| enum | LimitType { VELOCITY , ACCELERATION } |
Functions | |
| MOVEIT_CLASS_FORWARD (TimeOptimalTrajectoryGeneration) | |
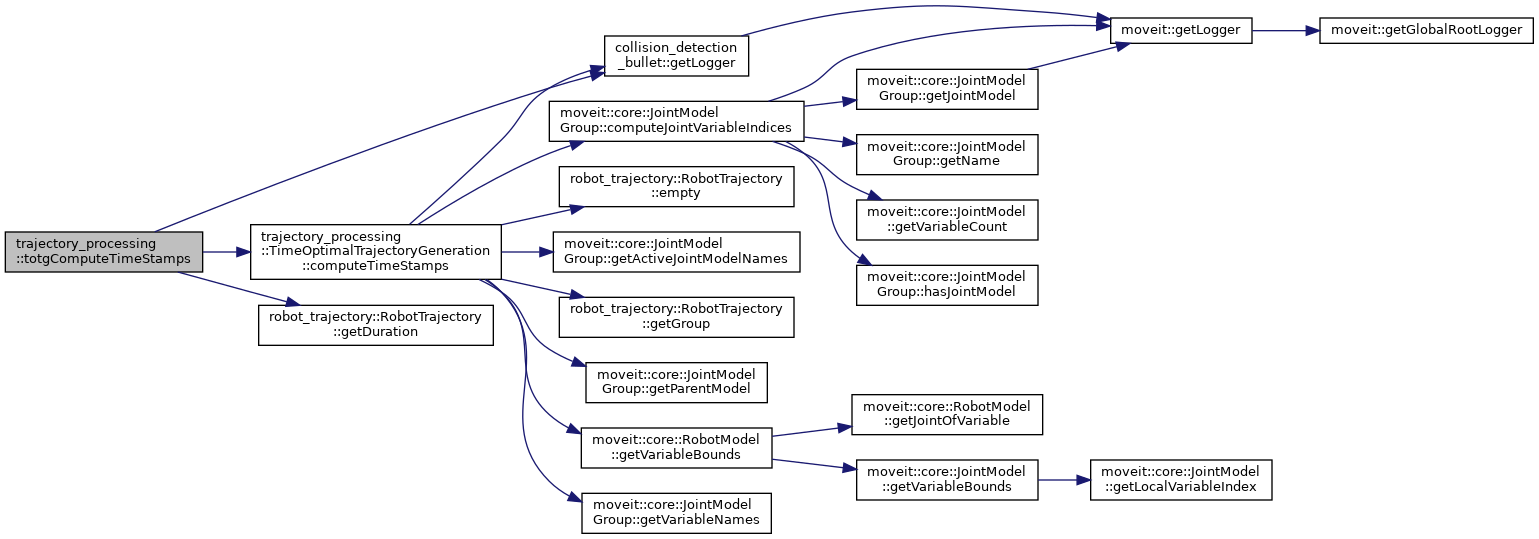
| bool | totgComputeTimeStamps (const size_t num_waypoints, robot_trajectory::RobotTrajectory &trajectory, const double max_velocity_scaling_factor=1.0, const double max_acceleration_scaling_factor=1.0) |
| Compute a trajectory with the desired number of waypoints. Resampling the trajectory doesn't change the start and goal point, and all re-sampled waypoints will be on the path of the original trajectory (within path_tolerance_). However, controller execution is separate from MoveIt and may deviate from the intended path between waypoints. path_tolerance_ is defined in configuration space, so the unit is rad for revolute joints, meters for prismatic joints. This is a free function because it needs to modify the const resample_dt_ member of TimeOptimalTrajectoryGeneration class. | |
| MOVEIT_CLASS_FORWARD (TimeParameterization) | |
| Base class for trajectory parameterization algorithms. | |
| bool | isTrajectoryEmpty (const moveit_msgs::msg::RobotTrajectory &trajectory) |
| Checks if a robot trajectory is empty. | |
| std::size_t | trajectoryWaypointCount (const moveit_msgs::msg::RobotTrajectory &trajectory) |
| Returns the number of waypoints in a robot trajectory. | |
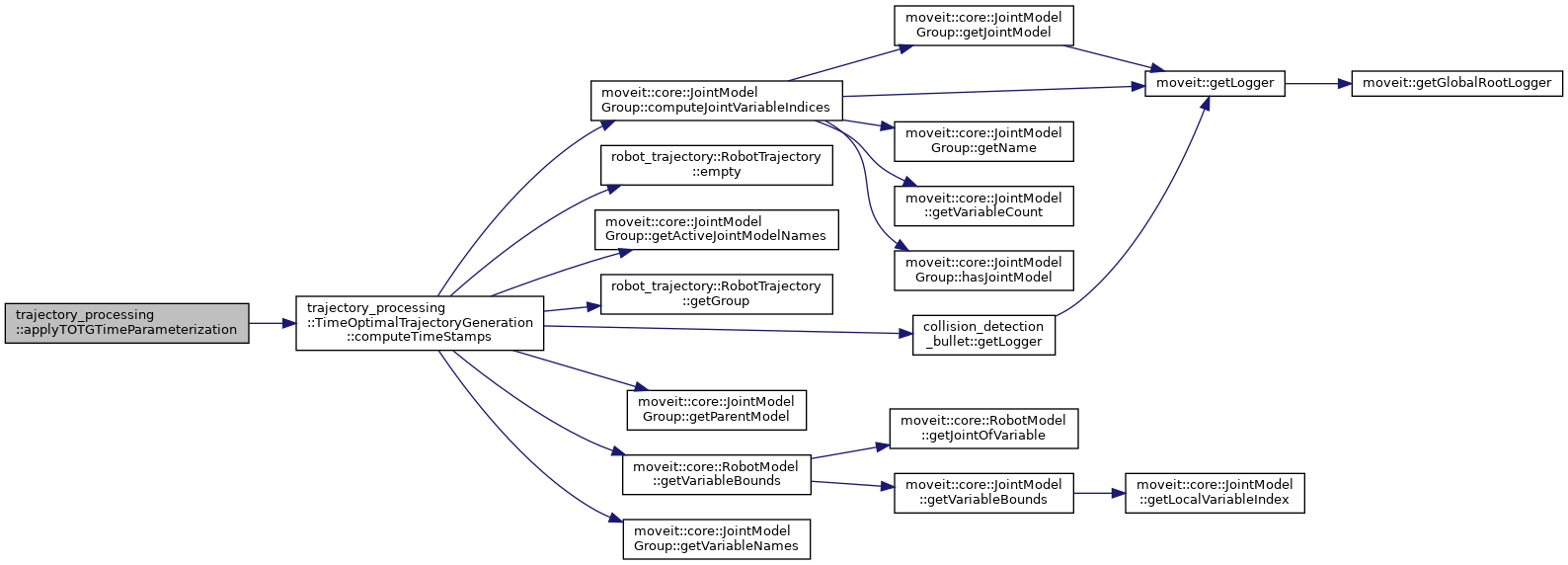
| bool | applyTOTGTimeParameterization (robot_trajectory::RobotTrajectory &trajectory, double velocity_scaling_factor, double acceleration_scaling_factor, double path_tolerance=0.1, double resample_dt=0.1, double min_angle_change=0.001) |
| Applies time parameterization to a robot trajectory using the Time-Optimal Trajectory Generation (TOTG) algorithm. | |
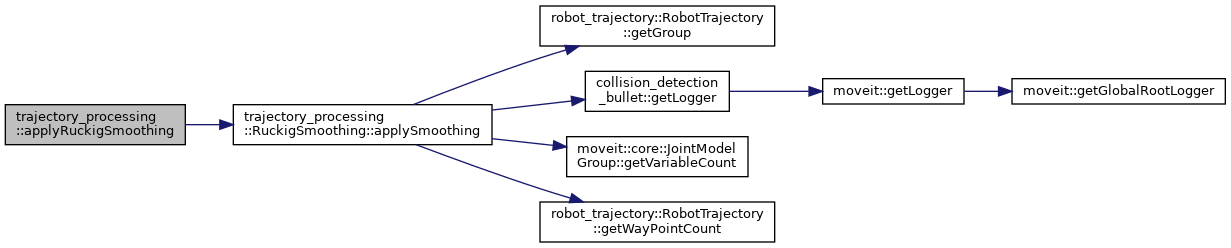
| bool | applyRuckigSmoothing (robot_trajectory::RobotTrajectory &trajectory, double velocity_scaling_factor, double acceleration_scaling_factor, bool mitigate_overshoot=false, double overshoot_threshold=0.01) |
| Applies Ruckig smoothing to a robot trajectory. | |
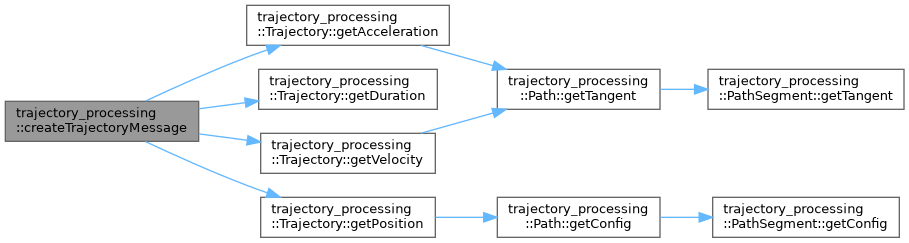
| trajectory_msgs::msg::JointTrajectory | createTrajectoryMessage (const std::vector< std::string > &joint_names, const trajectory_processing::Trajectory &trajectory, const int sampling_rate) |
Converts a trajectory_processing::Trajectory into a JointTrajectory message with a given sampling rate. | |
Variables | |
| constexpr double | DEFAULT_PATH_TOLERANCE = 0.1 |
| const std::unordered_map< LimitType, std::string > | LIMIT_TYPES |
Enumeration Type Documentation
◆ LimitType
| Enumerator | |
|---|---|
| VELOCITY | |
| ACCELERATION | |
Definition at line 54 of file time_optimal_trajectory_generation.hpp.
Function Documentation
◆ applyRuckigSmoothing()
| bool trajectory_processing::applyRuckigSmoothing | ( | robot_trajectory::RobotTrajectory & | trajectory, |
| double | velocity_scaling_factor, | ||
| double | acceleration_scaling_factor, | ||
| bool | mitigate_overshoot = false, |
||
| double | overshoot_threshold = 0.01 |
||
| ) |
Applies Ruckig smoothing to a robot trajectory.
- Parameters
-
[in,out] trajectory The robot trajectory to be smoothed. [in] velocity_scaling_factor The factor by which to scale the maximum velocity of the trajectory. [in] acceleration_scaling_factor The factor by which to scale the maximum acceleration of the trajectory. [in] mitigate_overshoot Whether to mitigate overshoot during smoothing (default: false). [in] overshoot_threshold The maximum allowed overshoot during smoothing (default: 0.01).
- Returns
- True if smoothing was successful, false otherwise.
Definition at line 70 of file trajectory_tools.cpp.

◆ applyTOTGTimeParameterization()
| bool trajectory_processing::applyTOTGTimeParameterization | ( | robot_trajectory::RobotTrajectory & | trajectory, |
| double | velocity_scaling_factor, | ||
| double | acceleration_scaling_factor, | ||
| double | path_tolerance = 0.1, |
||
| double | resample_dt = 0.1, |
||
| double | min_angle_change = 0.001 |
||
| ) |
Applies time parameterization to a robot trajectory using the Time-Optimal Trajectory Generation (TOTG) algorithm.
- Parameters
-
[in,out] trajectory The robot trajectory to be time parameterized. [in] velocity_scaling_factor The factor by which to scale the maximum velocity of the trajectory. [in] acceleration_scaling_factor The factor by which to scale the maximum acceleration of the trajectory. [in] path_tolerance The path tolerance to use for time parameterization (default: 0.1). [in] resample_dt The time step to use for time parameterization (default: 0.1). [in] min_angle_change The minimum angle change to use for time parameterization (default: 0.001).
- Returns
- True if time parameterization was successful, false otherwise.
Definition at line 63 of file trajectory_tools.cpp.

◆ createTrajectoryMessage()
| trajectory_msgs::msg::JointTrajectory trajectory_processing::createTrajectoryMessage | ( | const std::vector< std::string > & | joint_names, |
| const trajectory_processing::Trajectory & | trajectory, | ||
| const int | sampling_rate | ||
| ) |
Converts a trajectory_processing::Trajectory into a JointTrajectory message with a given sampling rate.
Definition at line 78 of file trajectory_tools.cpp.
◆ isTrajectoryEmpty()
| bool trajectory_processing::isTrajectoryEmpty | ( | const moveit_msgs::msg::RobotTrajectory & | trajectory | ) |
Checks if a robot trajectory is empty.
- Parameters
-
[in] trajectory The robot trajectory to check.
- Returns
- True if the trajectory is empty, false otherwise.
Definition at line 54 of file trajectory_tools.cpp.
◆ MOVEIT_CLASS_FORWARD() [1/2]
| trajectory_processing::MOVEIT_CLASS_FORWARD | ( | TimeOptimalTrajectoryGeneration | ) |
◆ MOVEIT_CLASS_FORWARD() [2/2]
| trajectory_processing::MOVEIT_CLASS_FORWARD | ( | TimeParameterization | ) |
Base class for trajectory parameterization algorithms.
◆ totgComputeTimeStamps()
| bool trajectory_processing::totgComputeTimeStamps | ( | const size_t | num_waypoints, |
| robot_trajectory::RobotTrajectory & | trajectory, | ||
| const double | max_velocity_scaling_factor = 1.0, |
||
| const double | max_acceleration_scaling_factor = 1.0 |
||
| ) |
Compute a trajectory with the desired number of waypoints. Resampling the trajectory doesn't change the start and goal point, and all re-sampled waypoints will be on the path of the original trajectory (within path_tolerance_). However, controller execution is separate from MoveIt and may deviate from the intended path between waypoints. path_tolerance_ is defined in configuration space, so the unit is rad for revolute joints, meters for prismatic joints. This is a free function because it needs to modify the const resample_dt_ member of TimeOptimalTrajectoryGeneration class.
- Parameters
-
num_waypoints The desired number of waypoints (plus or minus one due to numerical rounding). [in,out] trajectory A path which needs time-parameterization. It's OK if this path has already been time-parameterized; this function will re-time-parameterize it. max_velocity_scaling_factor A factor in the range [0,1] which can slow down the trajectory. max_acceleration_scaling_factor A factor in the range [0,1] which can slow down the trajectory.
Definition at line 1137 of file time_optimal_trajectory_generation.cpp.

◆ trajectoryWaypointCount()
| std::size_t trajectory_processing::trajectoryWaypointCount | ( | const moveit_msgs::msg::RobotTrajectory & | trajectory | ) |
Returns the number of waypoints in a robot trajectory.
- Parameters
-
[in] trajectory The robot trajectory to count waypoints in.
- Returns
- The number of waypoints in the trajectory.
Definition at line 59 of file trajectory_tools.cpp.
Variable Documentation
◆ DEFAULT_PATH_TOLERANCE
|
constexpr |
Definition at line 52 of file time_optimal_trajectory_generation.hpp.
◆ LIMIT_TYPES
| const std::unordered_map<LimitType, std::string> trajectory_processing::LIMIT_TYPES |
Definition at line 60 of file time_optimal_trajectory_generation.hpp.