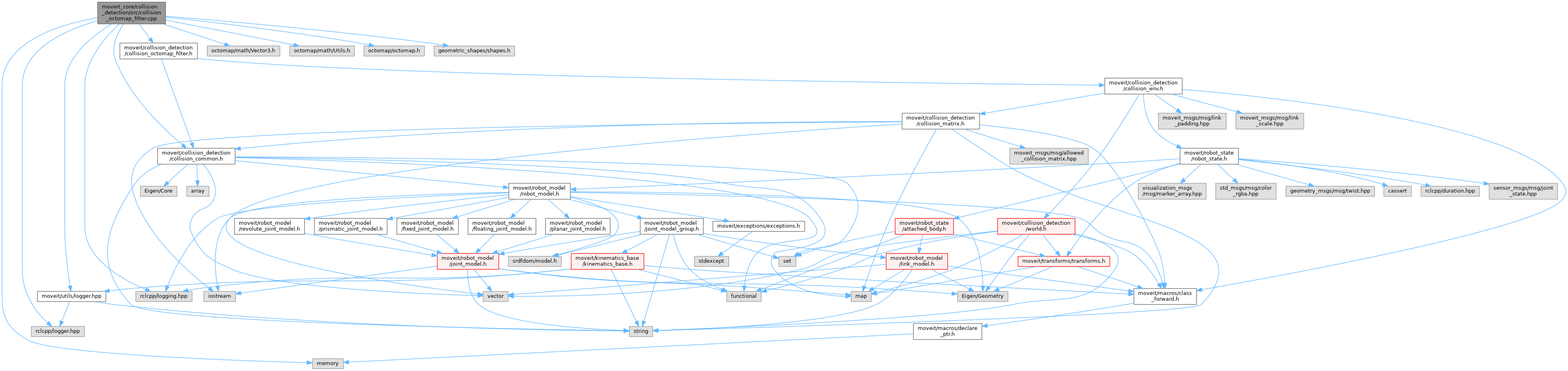
#include <moveit/collision_detection/collision_common.hpp>#include <moveit/collision_detection/collision_octomap_filter.hpp>#include <octomap/math/Vector3.h>#include <octomap/math/Utils.h>#include <octomap/octomap.h>#include <geometric_shapes/shapes.h>#include <rclcpp/logger.hpp>#include <rclcpp/logging.hpp>#include <memory>#include <moveit/utils/logger.hpp>
Include dependency graph for collision_octomap_filter.cpp:
Go to the source code of this file.
Functions | |
| bool | getMetaballSurfaceProperties (const octomap::point3d_list &cloud, double spacing, double iso_value, double r_multiple, const octomath::Vector3 &contact_point, octomath::Vector3 &normal, double &depth, bool estimate_depth) |
| bool | findSurface (const octomap::point3d_list &cloud, double spacing, double iso_value, double r_multiple, const octomath::Vector3 &seed, octomath::Vector3 &surface_point, octomath::Vector3 &normal) |
| bool | sampleCloud (const octomap::point3d_list &cloud, double spacing, double r_multiple, const octomath::Vector3 &position, double &intensity, octomath::Vector3 &gradient) |
Function Documentation
◆ findSurface()
| bool findSurface | ( | const octomap::point3d_list & | cloud, |
| double | spacing, | ||
| double | iso_value, | ||
| double | r_multiple, | ||
| const octomath::Vector3 & | seed, | ||
| octomath::Vector3 & | surface_point, | ||
| octomath::Vector3 & | normal | ||
| ) |
Definition at line 214 of file collision_octomap_filter.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ getMetaballSurfaceProperties()
| bool getMetaballSurfaceProperties | ( | const octomap::point3d_list & | cloud, |
| double | spacing, | ||
| double | iso_value, | ||
| double | r_multiple, | ||
| const octomath::Vector3 & | contact_point, | ||
| octomath::Vector3 & | normal, | ||
| double & | depth, | ||
| bool | estimate_depth | ||
| ) |
Definition at line 177 of file collision_octomap_filter.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ sampleCloud()
| bool sampleCloud | ( | const octomap::point3d_list & | cloud, |
| double | spacing, | ||
| double | r_multiple, | ||
| const octomath::Vector3 & | position, | ||
| double & | intensity, | ||
| octomath::Vector3 & | gradient | ||
| ) |
Definition at line 239 of file collision_octomap_filter.cpp.
Here is the caller graph for this function:
