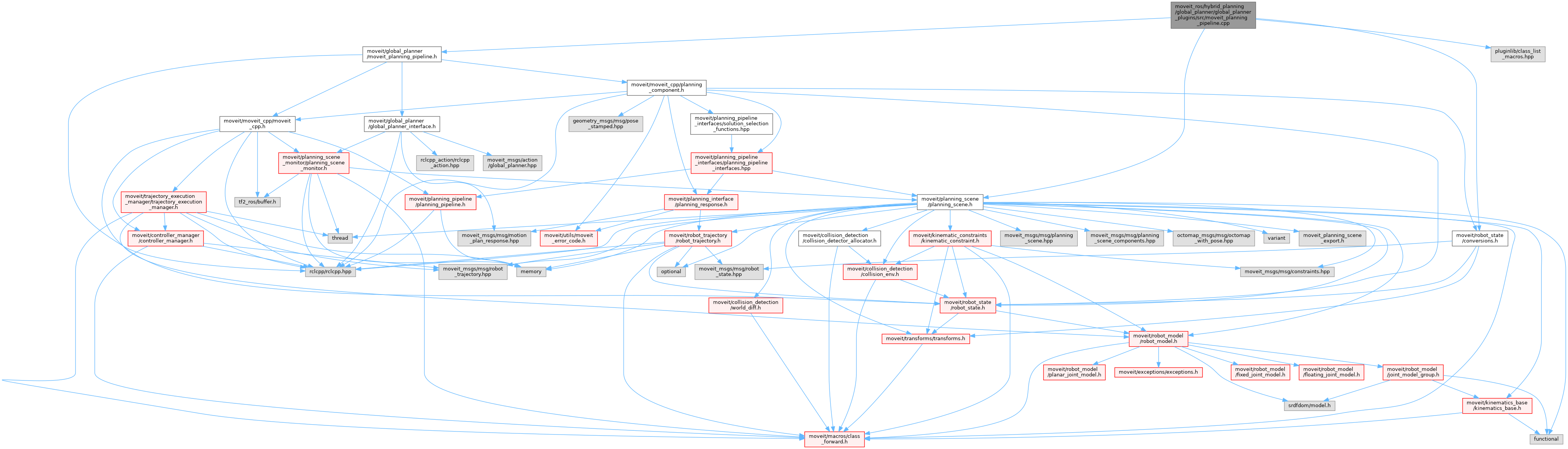
#include <moveit/global_planner/moveit_planning_pipeline.hpp>#include <moveit/planning_scene/planning_scene.hpp>#include <moveit/robot_state/conversions.hpp>#include <pluginlib/class_list_macros.hpp>
Include dependency graph for moveit_planning_pipeline.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit |
| Main namespace for MoveIt. | |
| namespace | moveit::hybrid_planning |
Functions | |
| PLUGINLIB_EXPORT_CLASS (moveit::hybrid_planning::MoveItPlanningPipeline, moveit::hybrid_planning::GlobalPlannerInterface) | |
Variables | |
| const std::string | moveit::hybrid_planning::PLANNING_SCENE_MONITOR_NS = "planning_scene_monitor_options." |
| const std::string | moveit::hybrid_planning::PLANNING_PIPELINES_NS = "planning_pipelines." |
| const std::string | moveit::hybrid_planning::PLAN_REQUEST_PARAM_NS = "plan_request_params." |
Function Documentation
◆ PLUGINLIB_EXPORT_CLASS()
| PLUGINLIB_EXPORT_CLASS | ( | moveit::hybrid_planning::MoveItPlanningPipeline | , |
| moveit::hybrid_planning::GlobalPlannerInterface | |||
| ) |