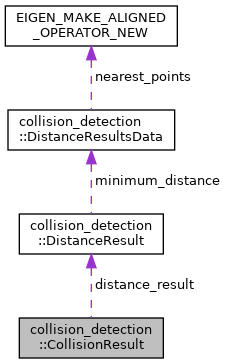
Representation of a collision checking result. More...
#include <collision_common.hpp>
Public Types | |
| using | ContactMap = std::map< std::pair< std::string, std::string >, std::vector< Contact > > |
| A map returning the pairs of body ids in contact, plus their contact details. | |
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW void | clear () |
| Clear a previously stored result. | |
| void | print () const |
| Throttled warning printing the first collision pair, if any. All collisions are logged at DEBUG level. | |
Public Attributes | |
| bool | collision = false |
| True if collision was found, false otherwise. | |
| double | distance = std::numeric_limits<double>::max() |
| Closest distance between two bodies. | |
| DistanceResult | distance_result |
| Distance data for each link. | |
| std::size_t | contact_count = 0 |
| Number of contacts returned. | |
| ContactMap | contacts |
| std::set< CostSource > | cost_sources |
| These are the individual cost sources when costs are computed. | |
Detailed Description
Representation of a collision checking result.
Definition at line 334 of file collision_common.hpp.
Member Typedef Documentation
◆ ContactMap
| using collision_detection::CollisionResult::ContactMap = std::map<std::pair<std::string, std::string>, std::vector<Contact> > |
A map returning the pairs of body ids in contact, plus their contact details.
Definition at line 365 of file collision_common.hpp.
Member Function Documentation
◆ clear()
|
inline |
Clear a previously stored result.
Definition at line 339 of file collision_common.hpp.

◆ print()
| void collision_detection::CollisionResult::print | ( | ) | const |
Throttled warning printing the first collision pair, if any. All collisions are logged at DEBUG level.
Definition at line 53 of file collision_common.cpp.

Member Data Documentation
◆ collision
| bool collision_detection::CollisionResult::collision = false |
True if collision was found, false otherwise.
Definition at line 353 of file collision_common.hpp.
◆ contact_count
| std::size_t collision_detection::CollisionResult::contact_count = 0 |
Number of contacts returned.
Definition at line 362 of file collision_common.hpp.
◆ contacts
| ContactMap collision_detection::CollisionResult::contacts |
Definition at line 366 of file collision_common.hpp.
◆ cost_sources
| std::set<CostSource> collision_detection::CollisionResult::cost_sources |
These are the individual cost sources when costs are computed.
Definition at line 369 of file collision_common.hpp.
◆ distance
| double collision_detection::CollisionResult::distance = std::numeric_limits<double>::max() |
Closest distance between two bodies.
Definition at line 356 of file collision_common.hpp.
◆ distance_result
| DistanceResult collision_detection::CollisionResult::distance_result |
Distance data for each link.
Definition at line 359 of file collision_common.hpp.
The documentation for this struct was generated from the following files:
- moveit_core/collision_detection/include/moveit/collision_detection/collision_common.hpp
- moveit_core/collision_detection/src/collision_common.cpp