#include <rclcpp/executors/single_threaded_executor.hpp>#include <rclcpp/rclcpp.hpp>#include <moveit/robot_state/conversions.hpp>#include <moveit/robot_state/robot_state.hpp>#include <moveit/trajectory_cache/trajectory_cache.hpp>#include <moveit/trajectory_cache/utils/utils.hpp>#include <atomic>#include <thread>
Include dependency graph for test_trajectory_cache.cpp:
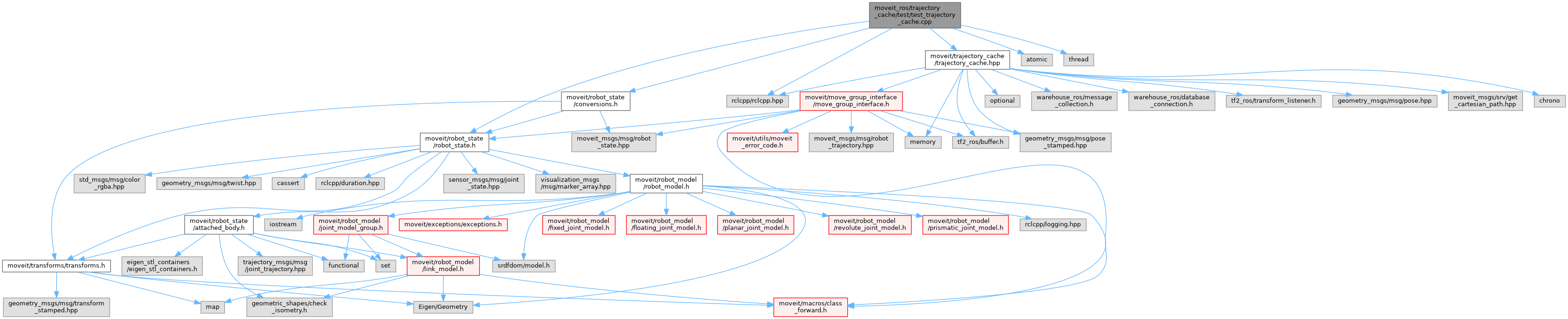
Go to the source code of this file.
Functions | |
| void | checkAndEmit (bool predicate, const std::string &test_case, const std::string &label) |
| moveit_msgs::msg::RobotTrajectory | getDummyPandaTraj () |
| std::vector< geometry_msgs::msg::Pose > | getDummyWaypoints () |
| void | testGettersAndSetters (const std::shared_ptr< TrajectoryCache > &cache) |
| void | testMotionTrajectories (const std::shared_ptr< MoveGroupInterface > &move_group, const std::shared_ptr< TrajectoryCache > &cache) |
| void | testCartesianTrajectories (const std::shared_ptr< MoveGroupInterface > &move_group, const std::shared_ptr< TrajectoryCache > &cache) |
| int | main (int argc, char **argv) |
Variables | |
| const std::string | ROBOT_NAME = "panda" |
| const std::string | ROBOT_FRAME = "world" |
Detailed Description
Definition in file test_trajectory_cache.cpp.
Function Documentation
◆ checkAndEmit()
| void checkAndEmit | ( | bool | predicate, |
| const std::string & | test_case, | ||
| const std::string & | label | ||
| ) |
Definition at line 39 of file test_trajectory_cache.cpp.
Here is the caller graph for this function:

◆ getDummyPandaTraj()
| moveit_msgs::msg::RobotTrajectory getDummyPandaTraj | ( | ) |
Definition at line 51 of file test_trajectory_cache.cpp.
Here is the caller graph for this function:

◆ getDummyWaypoints()
| std::vector< geometry_msgs::msg::Pose > getDummyWaypoints | ( | ) |
Definition at line 78 of file test_trajectory_cache.cpp.
Here is the caller graph for this function:

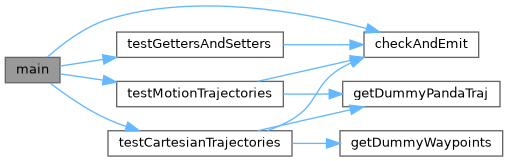
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 1029 of file test_trajectory_cache.cpp.
Here is the call graph for this function:
◆ testCartesianTrajectories()
| void testCartesianTrajectories | ( | const std::shared_ptr< MoveGroupInterface > & | move_group, |
| const std::shared_ptr< TrajectoryCache > & | cache | ||
| ) |
First, test if construction even works...
GetCartesianPath::Request
RobotTrajectory
Definition at line 577 of file test_trajectory_cache.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ testGettersAndSetters()
| void testGettersAndSetters | ( | const std::shared_ptr< TrajectoryCache > & | cache | ) |
Definition at line 98 of file test_trajectory_cache.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ testMotionTrajectories()
| void testMotionTrajectories | ( | const std::shared_ptr< MoveGroupInterface > & | move_group, |
| const std::shared_ptr< TrajectoryCache > & | cache | ||
| ) |
MotionPlanRequest
RobotTrajectory
Definition at line 116 of file test_trajectory_cache.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:

Variable Documentation
◆ ROBOT_FRAME
| const std::string ROBOT_FRAME = "world" |
Definition at line 35 of file test_trajectory_cache.cpp.
◆ ROBOT_NAME
| const std::string ROBOT_NAME = "panda" |
Definition at line 34 of file test_trajectory_cache.cpp.