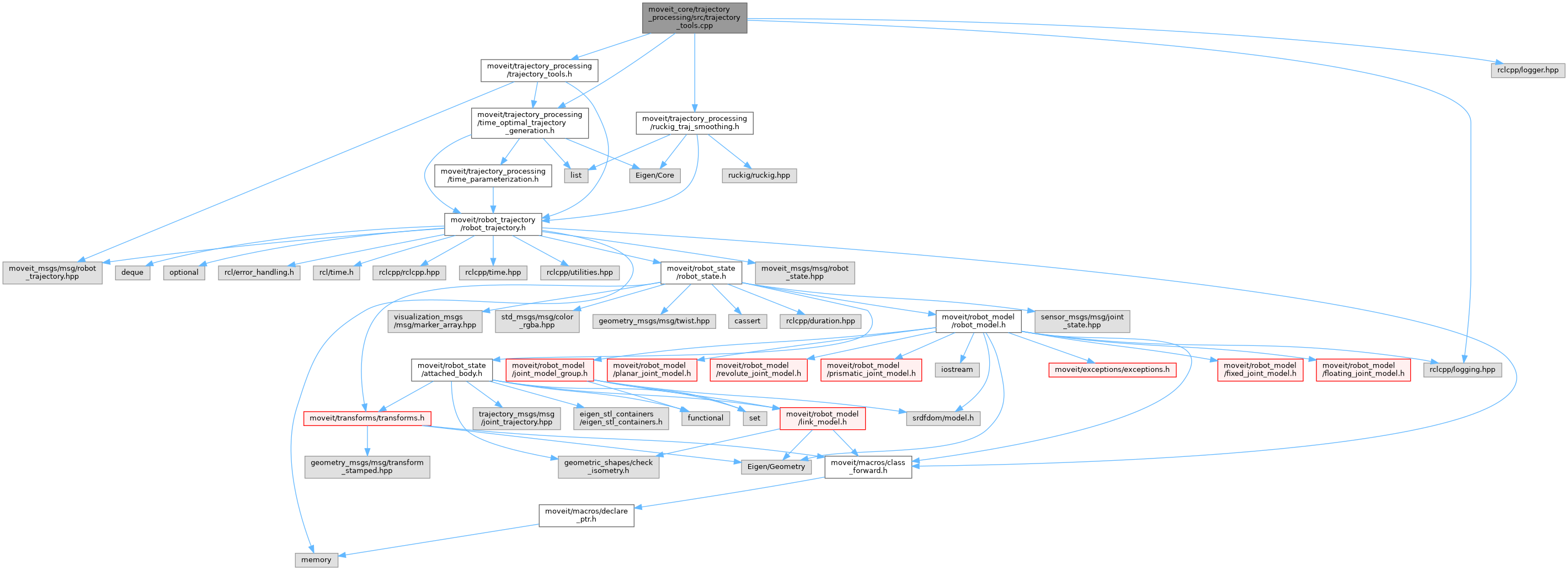
#include <moveit/trajectory_processing/trajectory_tools.hpp>#include <moveit/trajectory_processing/ruckig_traj_smoothing.hpp>#include <moveit/trajectory_processing/time_optimal_trajectory_generation.hpp>#include <rclcpp/logger.hpp>#include <rclcpp/logging.hpp>
Include dependency graph for trajectory_tools.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | trajectory_processing |
Functions | |
| bool | trajectory_processing::isTrajectoryEmpty (const moveit_msgs::msg::RobotTrajectory &trajectory) |
| Checks if a robot trajectory is empty. | |
| std::size_t | trajectory_processing::trajectoryWaypointCount (const moveit_msgs::msg::RobotTrajectory &trajectory) |
| Returns the number of waypoints in a robot trajectory. | |
| bool | trajectory_processing::applyTOTGTimeParameterization (robot_trajectory::RobotTrajectory &trajectory, double velocity_scaling_factor, double acceleration_scaling_factor, double path_tolerance=0.1, double resample_dt=0.1, double min_angle_change=0.001) |
| Applies time parameterization to a robot trajectory using the Time-Optimal Trajectory Generation (TOTG) algorithm. | |
| bool | trajectory_processing::applyRuckigSmoothing (robot_trajectory::RobotTrajectory &trajectory, double velocity_scaling_factor, double acceleration_scaling_factor, bool mitigate_overshoot=false, double overshoot_threshold=0.01) |
| Applies Ruckig smoothing to a robot trajectory. | |
| trajectory_msgs::msg::JointTrajectory | trajectory_processing::createTrajectoryMessage (const std::vector< std::string > &joint_names, const trajectory_processing::Trajectory &trajectory, const int sampling_rate) |
Converts a trajectory_processing::Trajectory into a JointTrajectory message with a given sampling rate. | |