#include <boost/core/demangle.hpp>#include <gtest/gtest.h>#include <moveit/planning_interface/planning_interface.hpp>#include <moveit/planning_scene/planning_scene.hpp>#include <moveit/robot_model/robot_model.hpp>#include <moveit/robot_model_loader/robot_model_loader.hpp>#include <moveit/robot_state/conversions.hpp>#include <moveit/robot_state/robot_state.hpp>#include <pilz_industrial_motion_planner/joint_limits_aggregator.hpp>#include <pilz_industrial_motion_planner/joint_limits_container.hpp>#include <pilz_industrial_motion_planner/trajectory_generator_circ.hpp>#include <pilz_industrial_motion_planner/trajectory_generator_lin.hpp>#include <pilz_industrial_motion_planner/trajectory_generator_ptp.hpp>#include <pilz_industrial_motion_planner/trajectory_blender_transition_window.hpp>#include "test_utils.hpp"#include <rclcpp/rclcpp.hpp>#include <pilz_industrial_motion_planner/cartesian_limits_parameters.hpp>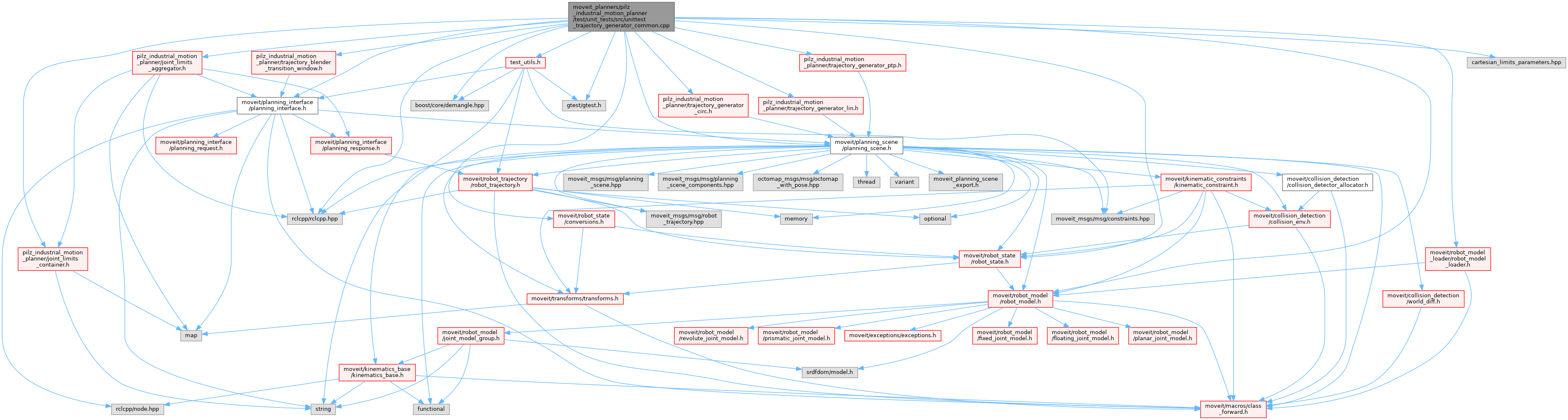
Go to the source code of this file.
Classes | |
| class | ValueTypeContainer< T, N > |
| class | TrajectoryGeneratorCommonTest< T > |
| class | TrajectoryGeneratorCommonTestNoGripper< T > |
Functions | |
| TYPED_TEST_SUITE (TrajectoryGeneratorCommonTest, TrajectoryGeneratorCommonTestTypes,) | |
| TYPED_TEST_SUITE (TrajectoryGeneratorCommonTestNoGripper, TrajectoryGeneratorCommonTestTypesNoGripper,) | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, InvalideScalingFactor) | |
| test invalid scaling factor. The scaling factor must be in the range of [0.0001, 1] | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, InvalidGroupName) | |
| Test invalid motion plan request for all trajectory generators. | |
| TYPED_TEST (TrajectoryGeneratorCommonTestNoGripper, GripperGroup) | |
| Test invalid motion plan request for all trajectory generators. | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, EmptyJointNamesInStartState) | |
| Test invalid motion plan request for all trajectory generators. | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, InconsistentStartState) | |
| size of joint name and joint position does not match in start state | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, StartPostionOutOfLimit) | |
| joint position out of limit in start state | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, StartPositionVelocityNoneZero) | |
| Check that no trajectory is generated if a start velocity is given. | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, EmptyGoalConstraints) | |
| goal constraints is empty | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, MultipleGoals) | |
| multiple goals | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, InvalideJointNameInGoal) | |
| invalid joint name in joint constraint | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, MissingJointConstraint) | |
| MissingJointConstraint. | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, InvalideJointPositionInGoal) | |
| invalid joint position in joint constraint | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, InvalidLinkNameInCartesianGoal) | |
| invalid link name in Cartesian goal constraint | |
| TYPED_TEST (TrajectoryGeneratorCommonTest, EmptyPrimitivePoses) | |
| no pose set in position constraint | |
| int | main (int argc, char **argv) |
Variables | |
| const std::string | PARAM_MODEL_NO_GRIPPER_NAME { "robot_description" } |
| const std::string | PARAM_MODEL_WITH_GRIPPER_NAME { "robot_description_pg70" } |
| const std::string | PARAM_NAMESPACE_LIMITS { "robot_description_planning" } |
Typedef Documentation
◆ CIRC_NO_GRIPPER
| typedef ValueTypeContainer<pilz_industrial_motion_planner::TrajectoryGeneratorCIRC, 0> CIRC_NO_GRIPPER |
Definition at line 82 of file unittest_trajectory_generator_common.cpp.
◆ CIRC_WITH_GRIPPER
| typedef ValueTypeContainer<pilz_industrial_motion_planner::TrajectoryGeneratorCIRC, 1> CIRC_WITH_GRIPPER |
Definition at line 83 of file unittest_trajectory_generator_common.cpp.
◆ LIN_NO_GRIPPER
| typedef ValueTypeContainer<pilz_industrial_motion_planner::TrajectoryGeneratorLIN, 0> LIN_NO_GRIPPER |
Definition at line 80 of file unittest_trajectory_generator_common.cpp.
◆ LIN_WITH_GRIPPER
| typedef ValueTypeContainer<pilz_industrial_motion_planner::TrajectoryGeneratorLIN, 1> LIN_WITH_GRIPPER |
Definition at line 81 of file unittest_trajectory_generator_common.cpp.
◆ PTP_NO_GRIPPER
| typedef ValueTypeContainer<pilz_industrial_motion_planner::TrajectoryGeneratorPTP, 0> PTP_NO_GRIPPER |
Definition at line 78 of file unittest_trajectory_generator_common.cpp.
◆ PTP_WITH_GRIPPER
| typedef ValueTypeContainer<pilz_industrial_motion_planner::TrajectoryGeneratorPTP, 1> PTP_WITH_GRIPPER |
Definition at line 79 of file unittest_trajectory_generator_common.cpp.
◆ TrajectoryGeneratorCommonTestTypes
| typedef ::testing::Types<PTP_NO_GRIPPER, PTP_WITH_GRIPPER, LIN_NO_GRIPPER, LIN_WITH_GRIPPER, CIRC_NO_GRIPPER, CIRC_WITH_GRIPPER> TrajectoryGeneratorCommonTestTypes |
Definition at line 87 of file unittest_trajectory_generator_common.cpp.
◆ TrajectoryGeneratorCommonTestTypesNoGripper
| typedef ::testing::Types<PTP_NO_GRIPPER, LIN_NO_GRIPPER, CIRC_NO_GRIPPER> TrajectoryGeneratorCommonTestTypesNoGripper |
Definition at line 89 of file unittest_trajectory_generator_common.cpp.
◆ TrajectoryGeneratorCommonTestTypesWithGripper
| typedef ::testing::Types<PTP_WITH_GRIPPER, LIN_WITH_GRIPPER, CIRC_WITH_GRIPPER> TrajectoryGeneratorCommonTestTypesWithGripper |
Definition at line 92 of file unittest_trajectory_generator_common.cpp.
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 443 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [1/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| EmptyGoalConstraints | |||
| ) |
goal constraints is empty
Definition at line 306 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [2/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| EmptyJointNamesInStartState | |||
| ) |
Test invalid motion plan request for all trajectory generators.
Test if there is a valid inverse kinematics solver for this planning group You can only test this case by commenting the planning_context.launch in the .test file //TODO create a separate robot model without ik solver and use it to create a trajectory generator
test the case of empty joint names in start state
Definition at line 262 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [3/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| EmptyPrimitivePoses | |||
| ) |
no pose set in position constraint
Definition at line 426 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [4/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| InconsistentStartState | |||
| ) |
size of joint name and joint position does not match in start state
Definition at line 272 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [5/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| InvalideJointNameInGoal | |||
| ) |
invalid joint name in joint constraint
Definition at line 360 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [6/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| InvalideJointPositionInGoal | |||
| ) |
invalid joint position in joint constraint
Definition at line 384 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [7/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| InvalideScalingFactor | |||
| ) |
test invalid scaling factor. The scaling factor must be in the range of [0.0001, 1]
Definition at line 192 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [8/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| InvalidGroupName | |||
| ) |
Test invalid motion plan request for all trajectory generators.
Definition at line 217 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [9/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| InvalidLinkNameInCartesianGoal | |||
| ) |
invalid link name in Cartesian goal constraint
Definition at line 394 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [10/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| MissingJointConstraint | |||
| ) |
MissingJointConstraint.
Definition at line 372 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [11/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| MultipleGoals | |||
| ) |
multiple goals
Definition at line 316 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [12/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| StartPositionVelocityNoneZero | |||
| ) |
Check that no trajectory is generated if a start velocity is given.
- Note
- This test is here for regression, however in general generators that can work with a given start velocity are highly desired.
Definition at line 296 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [13/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTest | , |
| StartPostionOutOfLimit | |||
| ) |
joint position out of limit in start state
Definition at line 282 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST() [14/14]
| TYPED_TEST | ( | TrajectoryGeneratorCommonTestNoGripper | , |
| GripperGroup | |||
| ) |
Test invalid motion plan request for all trajectory generators.
Definition at line 227 of file unittest_trajectory_generator_common.cpp.
◆ TYPED_TEST_SUITE() [1/2]
| TYPED_TEST_SUITE | ( | TrajectoryGeneratorCommonTest | , |
| TrajectoryGeneratorCommonTestTypes | |||
| ) |
◆ TYPED_TEST_SUITE() [2/2]
| TYPED_TEST_SUITE | ( | TrajectoryGeneratorCommonTestNoGripper | , |
| TrajectoryGeneratorCommonTestTypesNoGripper | |||
| ) |
Variable Documentation
◆ PARAM_MODEL_NO_GRIPPER_NAME
| const std::string PARAM_MODEL_NO_GRIPPER_NAME { "robot_description" } |
Definition at line 58 of file unittest_trajectory_generator_common.cpp.
◆ PARAM_MODEL_WITH_GRIPPER_NAME
| const std::string PARAM_MODEL_WITH_GRIPPER_NAME { "robot_description_pg70" } |
Definition at line 59 of file unittest_trajectory_generator_common.cpp.
◆ PARAM_NAMESPACE_LIMITS
| const std::string PARAM_NAMESPACE_LIMITS { "robot_description_planning" } |
Definition at line 60 of file unittest_trajectory_generator_common.cpp.