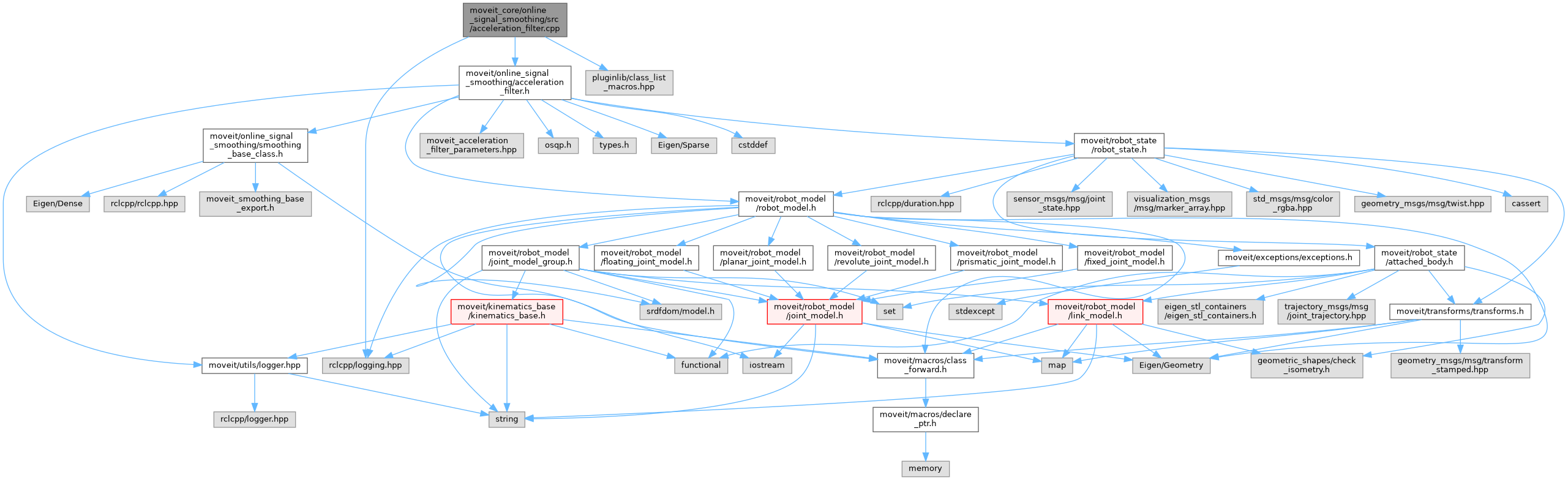
#include <moveit/online_signal_smoothing/acceleration_filter.hpp>#include <rclcpp/logging.hpp>#include <pluginlib/class_list_macros.hpp>
Include dependency graph for acceleration_filter.cpp:
Go to the source code of this file.
Classes | |
| struct | online_signal_smoothing::CSCWrapper |
| Wrapper struct to make memory management easier for using osqp's C sparse_matrix types. More... | |
| struct | online_signal_smoothing::OSQPDataWrapper |
| Wrapper struct to make memory management easier for using osqp's C API. More... | |
Namespaces | |
| namespace | online_signal_smoothing |
Functions | |
| rclcpp::Logger | online_signal_smoothing::getLogger () |
| online_signal_smoothing::MOVEIT_STRUCT_FORWARD (OSQPDataWrapper) | |
| double | online_signal_smoothing::jointLimitAccelerationScalingFactor (const Eigen::VectorXd &accelerations, const moveit::core::JointBoundsVector &joint_bounds) |
| bool | online_signal_smoothing::updateData (const OSQPDataWrapperPtr &data, OSQPWorkspace *work, Eigen::SparseMatrix< double > &constraints_sparse, const Eigen::VectorXd &lower_bound, const Eigen::VectorXd &upper_bound) |
Variables | |
| constexpr double | online_signal_smoothing::COMMAND_DIFFERENCE_THRESHOLD = 1E-4 |
| constexpr double | online_signal_smoothing::ALPHA_UPPER_BOUND = 1.0 |
| constexpr double | online_signal_smoothing::ALPHA_LOWER_BOUND = 0.0 |