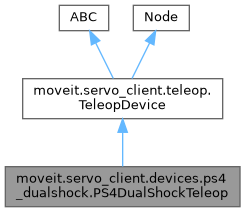
Inheritance diagram for moveit.servo_client.devices.ps4_dualshock.PS4DualShockTeleop:
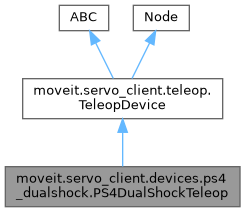
Collaboration diagram for moveit.servo_client.devices.ps4_dualshock.PS4DualShockTeleop:
Public Member Functions | |
| __init__ (self, str ee_frame_name, str node_name="ps4_dualshock_teleop", str device_name="ps4_dualshock", PS4DualShock device_config=PS4DualShock()) | |
| publish_command (self, data) | |
| record () | |
 Public Member Functions inherited from moveit.servo_client.teleop.TeleopDevice Public Member Functions inherited from moveit.servo_client.teleop.TeleopDevice | |
| start_teleop (self) | |
| stop_teleop (self) | |
Public Attributes | |
| logger | |
| Public Attributes inherited from moveit.servo_client.teleop.TeleopDevice | |
| device_name | |
| device_config | |
| ee_frame_name | |
| joy_subscriber | |
| twist_publisher | |
| servo_node_start_client | |
| servo_node_stop_client | |
| teleop_thread | |
Detailed Description
Definition at line 97 of file ps4_dualshock.py.
Constructor & Destructor Documentation
◆ __init__()
| moveit.servo_client.devices.ps4_dualshock.PS4DualShockTeleop.__init__ | ( | self, | |
| str | ee_frame_name, | ||
| str | node_name = "ps4_dualshock_teleop", |
||
| str | device_name = "ps4_dualshock", |
||
| PS4DualShock | device_config = PS4DualShock() |
||
| ) |
Reimplemented from moveit.servo_client.teleop.TeleopDevice.
Definition at line 100 of file ps4_dualshock.py.
Here is the call graph for this function:
Here is the caller graph for this function:
Member Function Documentation
◆ publish_command()
| moveit.servo_client.devices.ps4_dualshock.PS4DualShockTeleop.publish_command | ( | self, | |
| data | |||
| ) |
Publishes the teleop command.
Reimplemented from moveit.servo_client.teleop.TeleopDevice.
Definition at line 115 of file ps4_dualshock.py.
Here is the call graph for this function:

◆ record()
| moveit.servo_client.devices.ps4_dualshock.PS4DualShockTeleop.record | ( | ) |
Records trajectory data.
Reimplemented from moveit.servo_client.teleop.TeleopDevice.
Definition at line 143 of file ps4_dualshock.py.
Member Data Documentation
◆ logger
| moveit.servo_client.devices.ps4_dualshock.PS4DualShockTeleop.logger |
Definition at line 113 of file ps4_dualshock.py.
The documentation for this class was generated from the following file:
- moveit_py/moveit/servo_client/devices/ps4_dualshock.py