An interface for a OMPL state validity checker.
More...
#include <state_validity_checker.hpp>
|
| | StateValidityChecker (const ModelBasedPlanningContext *planning_context) |
| |
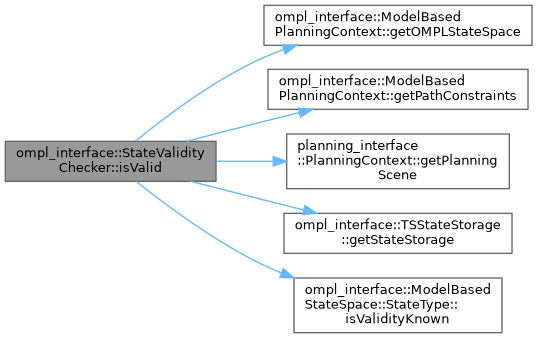
| bool | isValid (const ompl::base::State *state) const override |
| |
| bool | isValid (const ompl::base::State *state, double &dist) const override |
| |
| bool | isValid (const ompl::base::State *state, double &dist, ompl::base::State *, bool &) const override |
| |
| virtual bool | isValid (const ompl::base::State *state, bool verbose) const |
| |
| virtual bool | isValid (const ompl::base::State *state, double &dist, bool verbose) const |
| |
| virtual double | cost (const ompl::base::State *state) const |
| |
| double | clearance (const ompl::base::State *state) const override |
| |
| void | setVerbose (bool flag) |
| |
An interface for a OMPL state validity checker.
Definition at line 60 of file state_validity_checker.hpp.
◆ StateValidityChecker()
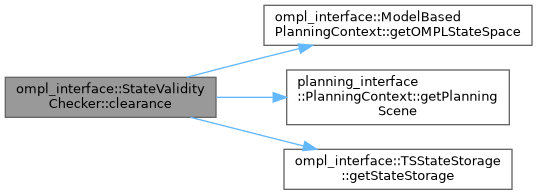
◆ clearance()
| double ompl_interface::StateValidityChecker::clearance |
( |
const ompl::base::State * |
state | ) |
const |
|
override |
◆ cost()
| double ompl_interface::StateValidityChecker::cost |
( |
const ompl::base::State * |
state | ) |
const |
|
virtual |
◆ isValid() [1/5]
| bool ompl_interface::StateValidityChecker::isValid |
( |
const ompl::base::State * |
state | ) |
const |
|
inlineoverride |
◆ isValid() [2/5]
| bool ompl_interface::StateValidityChecker::isValid |
( |
const ompl::base::State * |
state, |
|
|
bool |
verbose |
|
) |
| const |
|
virtual |
◆ isValid() [3/5]
| bool ompl_interface::StateValidityChecker::isValid |
( |
const ompl::base::State * |
state, |
|
|
double & |
dist |
|
) |
| const |
|
inlineoverride |
◆ isValid() [4/5]
| bool ompl_interface::StateValidityChecker::isValid |
( |
const ompl::base::State * |
state, |
|
|
double & |
dist, |
|
|
bool |
verbose |
|
) |
| const |
|
virtual |
◆ isValid() [5/5]
| bool ompl_interface::StateValidityChecker::isValid |
( |
const ompl::base::State * |
state, |
|
|
double & |
dist, |
|
|
ompl::base::State * |
, |
|
|
bool & |
|
|
) |
| const |
|
inlineoverride |
◆ setVerbose()
| void ompl_interface::StateValidityChecker::setVerbose |
( |
bool |
flag | ) |
|
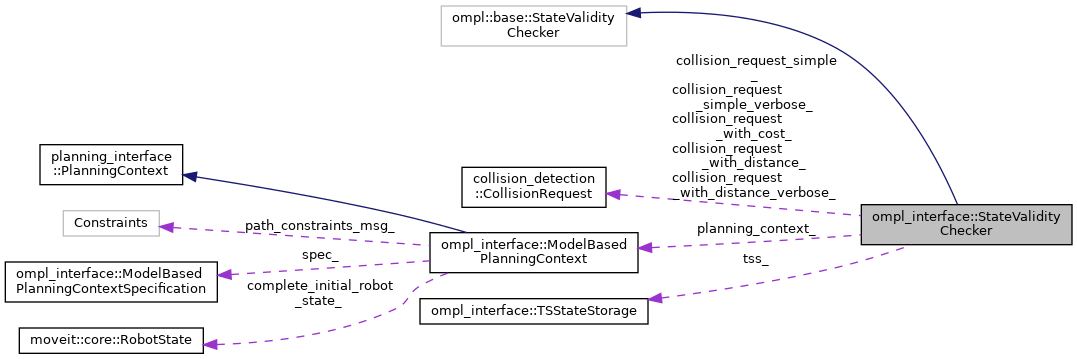
◆ collision_request_simple_
◆ collision_request_simple_verbose_
◆ collision_request_with_cost_
◆ collision_request_with_distance_
◆ collision_request_with_distance_verbose_
◆ group_name_
| std::string ompl_interface::StateValidityChecker::group_name_ |
|
protected |
◆ planning_context_
◆ tss_
◆ verbose_
| bool ompl_interface::StateValidityChecker::verbose_ |
|
protected |
The documentation for this class was generated from the following files: