Helper functions for converting between MoveIt types and plain Eigen types. More...
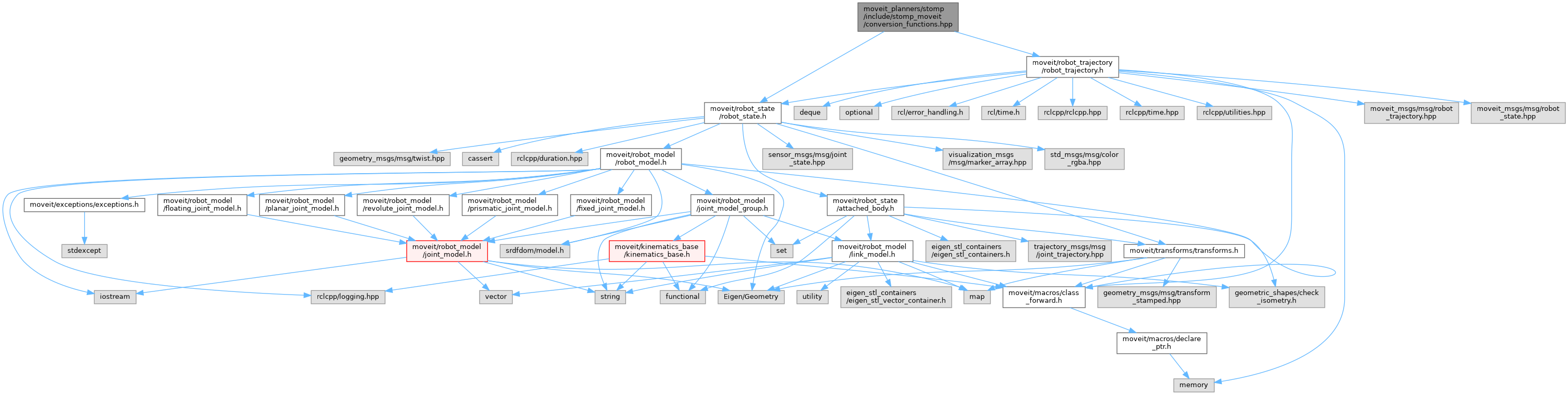
#include <moveit/robot_trajectory/robot_trajectory.hpp>#include <moveit/robot_state/robot_state.hpp>
Include dependency graph for conversion_functions.hpp:
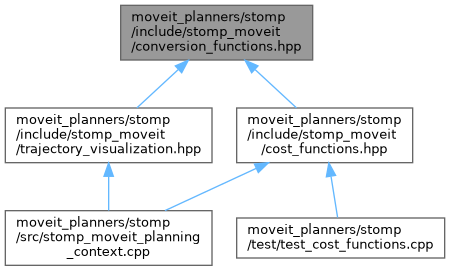
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | stomp_moveit |
Typedefs | |
| using | stomp_moveit::Joints = std::vector< const moveit::core::JointModel * > |
Functions | |
| std::vector< double > | stomp_moveit::getPositions (const moveit::core::RobotState &state, const Joints &joints) |
| void | stomp_moveit::setJointPositions (const Eigen::VectorXd &values, const Joints &joints, moveit::core::RobotState &state) |
| void | stomp_moveit::fillRobotTrajectory (const Eigen::MatrixXd &trajectory_values, const moveit::core::RobotState &reference_state, robot_trajectory::RobotTrajectory &trajectory) |
| robot_trajectory::RobotTrajectory | stomp_moveit::matrixToRobotTrajectory (const Eigen::MatrixXd &trajectory_values, const moveit::core::RobotState &reference_state, const moveit::core::JointModelGroup *group=nullptr) |
| Eigen::MatrixXd | stomp_moveit::robotTrajectoryToMatrix (const robot_trajectory::RobotTrajectory &trajectory) |
Detailed Description
Helper functions for converting between MoveIt types and plain Eigen types.
Definition in file conversion_functions.hpp.