Functions | |
| std::shared_ptr< robot_trajectory::RobotTrajectory > | getMotionPlanResponseTrajectory (std::shared_ptr< planning_interface::MotionPlanResponse > &response) |
| moveit_msgs::msg::RobotState | getMotionPlanResponseStartState (std::shared_ptr< planning_interface::MotionPlanResponse > &response) |
| moveit_msgs::msg::MoveItErrorCodes | getMotionPlanResponseErrorCode (std::shared_ptr< planning_interface::MotionPlanResponse > &response) |
| double | getMotionPlanResponsePlanningTime (std::shared_ptr< planning_interface::MotionPlanResponse > &response) |
| std::string | getMotionPlanResponsePlannerId (std::shared_ptr< planning_interface::MotionPlanResponse > &response) |
| void | initMotionPlanResponse (py::module &m) |
Function Documentation
◆ getMotionPlanResponseErrorCode()
| moveit_msgs::msg::MoveItErrorCodes moveit_py::bind_planning_interface::getMotionPlanResponseErrorCode | ( | std::shared_ptr< planning_interface::MotionPlanResponse > & | response | ) |

◆ getMotionPlanResponsePlannerId()
| std::string moveit_py::bind_planning_interface::getMotionPlanResponsePlannerId | ( | std::shared_ptr< planning_interface::MotionPlanResponse > & | response | ) |
Definition at line 69 of file planning_response.cpp.
◆ getMotionPlanResponsePlanningTime()
| double moveit_py::bind_planning_interface::getMotionPlanResponsePlanningTime | ( | std::shared_ptr< planning_interface::MotionPlanResponse > & | response | ) |
Definition at line 64 of file planning_response.cpp.
◆ getMotionPlanResponseStartState()
| moveit_msgs::msg::RobotState moveit_py::bind_planning_interface::getMotionPlanResponseStartState | ( | std::shared_ptr< planning_interface::MotionPlanResponse > & | response | ) |

◆ getMotionPlanResponseTrajectory()
| std::shared_ptr< robot_trajectory::RobotTrajectory > moveit_py::bind_planning_interface::getMotionPlanResponseTrajectory | ( | std::shared_ptr< planning_interface::MotionPlanResponse > & | response | ) |

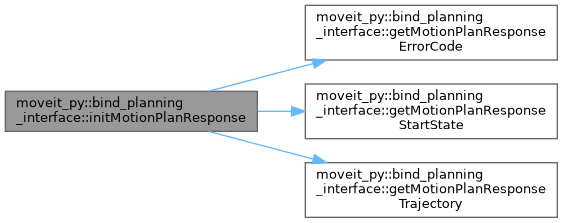
◆ initMotionPlanResponse()
| void moveit_py::bind_planning_interface::initMotionPlanResponse | ( | py::module & | m | ) |
Definition at line 74 of file planning_response.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:
