#include <gtest/gtest.h>#include <moveit/collision_detection_fcl/collision_detector_allocator_fcl.hpp>#include <moveit/planning_scene/planning_scene.hpp>#include <moveit/utils/message_checks.hpp>#include <moveit/utils/robot_model_test_utils.hpp>#include <urdf_parser/urdf_parser.h>#include <fstream>#include <sstream>#include <string>#include <tf2_eigen/tf2_eigen.hpp>#include <octomap_msgs/conversions.h>#include <octomap/octomap.h>#include <moveit/collision_detection/collision_common.hpp>#include <moveit/collision_detection/collision_plugin_cache.hpp>
Include dependency graph for test_planning_scene.cpp:

Go to the source code of this file.
Classes | |
| class | CollisionDetectorTests |
Macros | |
| #define | INSTANTIATE_TEST_SUITE_P(...) INSTANTIATE_TEST_CASE_P(__VA_ARGS__) |
Functions | |
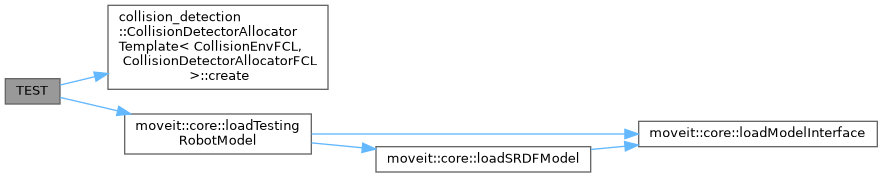
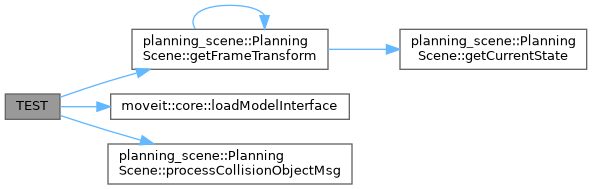
| TEST (PlanningScene, TestOneShapeObjectPose) | |
| TEST (PlanningScene, LoadRestore) | |
| TEST (PlanningScene, LoadOctomap) | |
| TEST (PlanningScene, LoadRestoreDiff) | |
| TEST (PlanningScene, MakeAttachedDiff) | |
| TEST (PlanningScene, isStateValid) | |
| TEST (PlanningScene, loadGoodSceneGeometryNewFormat) | |
| TEST (PlanningScene, loadGoodSceneGeometryOldFormat) | |
| TEST (PlanningScene, loadBadSceneGeometry) | |
| TEST (PlanningScene, switchCollisionDetectorType) | |
| TEST (PlanningScene, FailRetrievingNonExistentObject) | |
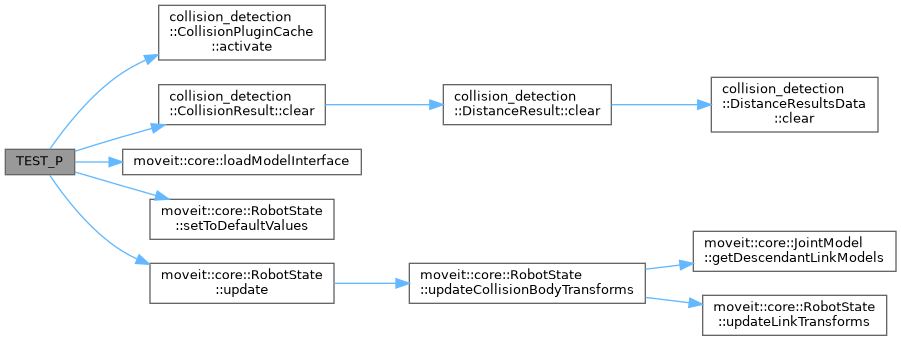
| TEST_P (CollisionDetectorTests, ClearDiff) | |
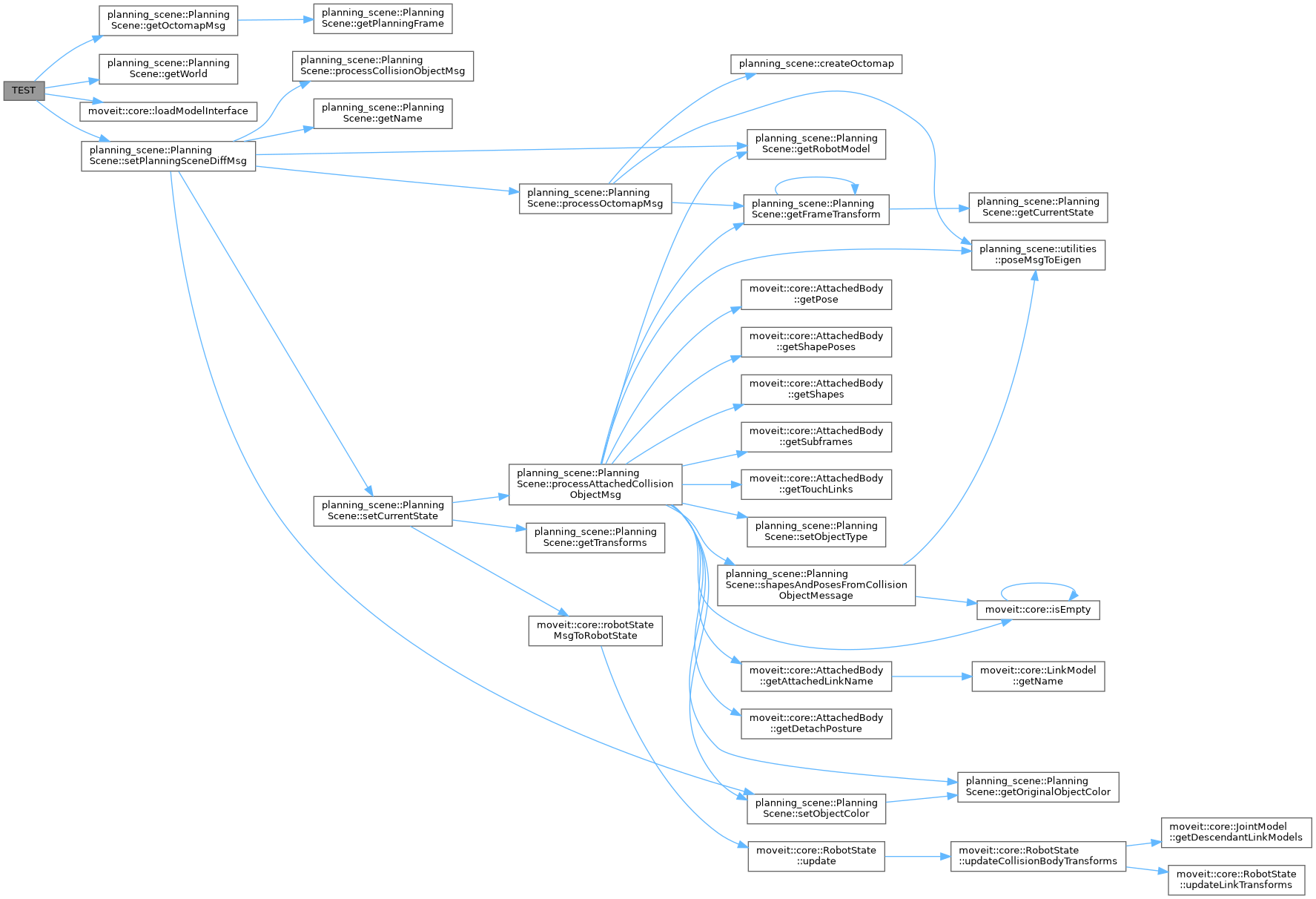
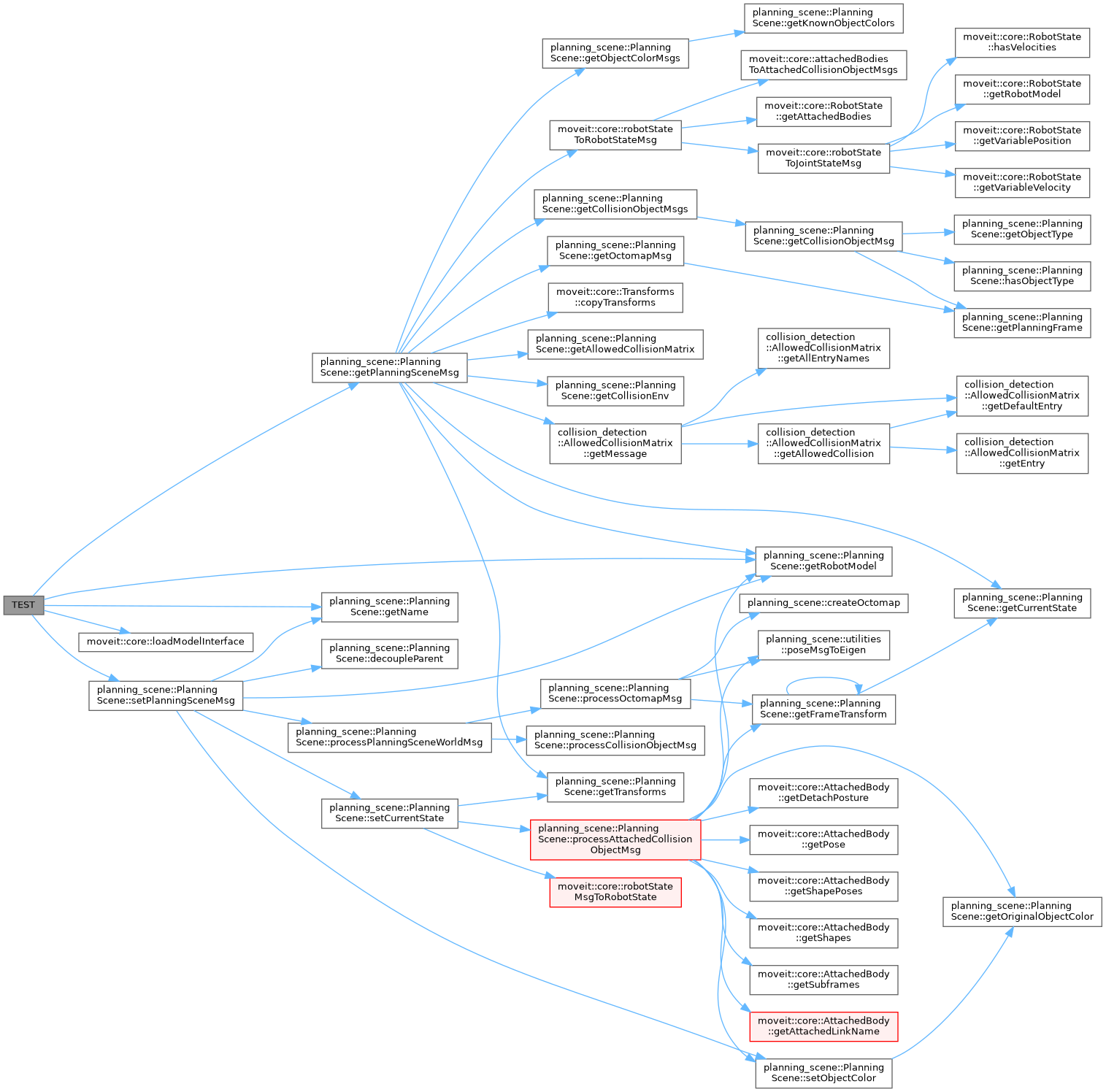
| moveit_msgs::msg::PlanningScene | createPlanningSceneDiff (const planning_scene::PlanningScene &ps, const std::string &object_name, const int8_t operation, const bool attach_object=false, const bool create_object=true) |
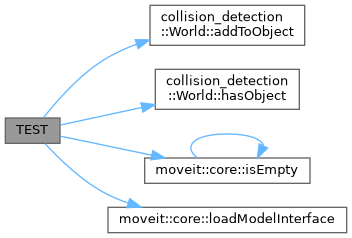
| std::set< std::string > | getCollisionObjectsNames (const planning_scene::PlanningScene &ps) |
| std::set< std::string > | getAttachedCollisionObjectsNames (const planning_scene::PlanningScene &ps) |
| TEST (PlanningScene, RobotStateDiffBug) | |
| TEST (PlanningScene, UpdateACMAfterObjectRemoval) | |
| INSTANTIATE_TEST_SUITE_P (PluginTests, CollisionDetectorTests, testing::Values("FCL", "Bullet")) | |
| int | main (int argc, char **argv) |
Macro Definition Documentation
◆ INSTANTIATE_TEST_SUITE_P
| #define INSTANTIATE_TEST_SUITE_P | ( | ... | ) | INSTANTIATE_TEST_CASE_P(__VA_ARGS__) |
Definition at line 668 of file test_planning_scene.cpp.
Function Documentation
◆ createPlanningSceneDiff()
| moveit_msgs::msg::PlanningScene createPlanningSceneDiff | ( | const planning_scene::PlanningScene & | ps, |
| const std::string & | object_name, | ||
| const int8_t | operation, | ||
| const bool | attach_object = false, |
||
| const bool | create_object = true |
||
| ) |
Definition at line 450 of file test_planning_scene.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

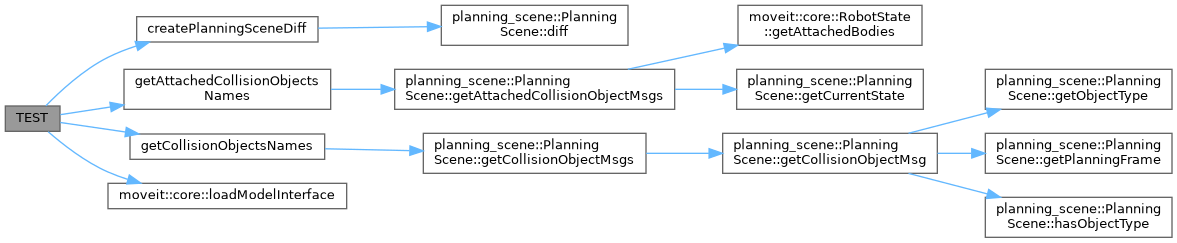
◆ getAttachedCollisionObjectsNames()
| std::set< std::string > getAttachedCollisionObjectsNames | ( | const planning_scene::PlanningScene & | ps | ) |
Definition at line 507 of file test_planning_scene.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ getCollisionObjectsNames()
| std::set< std::string > getCollisionObjectsNames | ( | const planning_scene::PlanningScene & | ps | ) |
Definition at line 496 of file test_planning_scene.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ INSTANTIATE_TEST_SUITE_P()
| INSTANTIATE_TEST_SUITE_P | ( | PluginTests | , |
| CollisionDetectorTests | , | ||
| testing::Values("FCL", "Bullet") | |||
| ) |
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 674 of file test_planning_scene.cpp.
◆ TEST() [1/13]
| TEST | ( | PlanningScene | , |
| FailRetrievingNonExistentObject | |||
| ) |

◆ TEST() [2/13]
| TEST | ( | PlanningScene | , |
| isStateValid | |||
| ) |

◆ TEST() [3/13]
| TEST | ( | PlanningScene | , |
| loadBadSceneGeometry | |||
| ) |

◆ TEST() [4/13]
| TEST | ( | PlanningScene | , |
| loadGoodSceneGeometryNewFormat | |||
| ) |

◆ TEST() [5/13]
| TEST | ( | PlanningScene | , |
| loadGoodSceneGeometryOldFormat | |||
| ) |

◆ TEST() [6/13]
| TEST | ( | PlanningScene | , |
| LoadOctomap | |||
| ) |
◆ TEST() [7/13]
| TEST | ( | PlanningScene | , |
| LoadRestore | |||
| ) |
◆ TEST() [8/13]
| TEST | ( | PlanningScene | , |
| LoadRestoreDiff | |||
| ) |
◆ TEST() [9/13]
| TEST | ( | PlanningScene | , |
| MakeAttachedDiff | |||
| ) |
◆ TEST() [10/13]
| TEST | ( | PlanningScene | , |
| RobotStateDiffBug | |||
| ) |
◆ TEST() [11/13]
| TEST | ( | PlanningScene | , |
| switchCollisionDetectorType | |||
| ) |
◆ TEST() [12/13]
| TEST | ( | PlanningScene | , |
| TestOneShapeObjectPose | |||
| ) |
◆ TEST() [13/13]
| TEST | ( | PlanningScene | , |
| UpdateACMAfterObjectRemoval | |||
| ) |

◆ TEST_P()
| TEST_P | ( | CollisionDetectorTests | , |
| ClearDiff | |||
| ) |