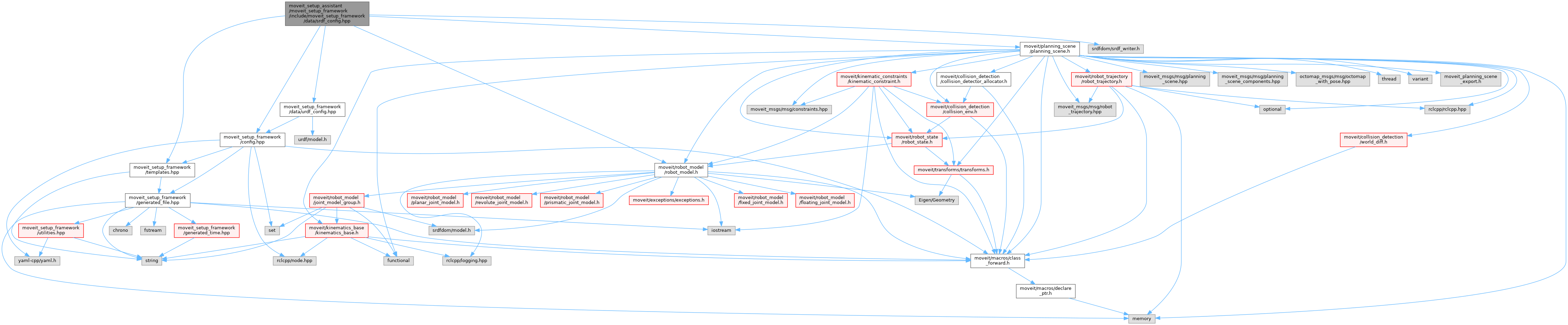
#include <moveit_setup_framework/config.hpp>#include <moveit_setup_framework/templates.hpp>#include <moveit_setup_framework/data/urdf_config.hpp>#include <moveit/robot_model/robot_model.hpp>#include <moveit/planning_scene/planning_scene.hpp>#include <srdfdom/srdf_writer.h>
Include dependency graph for srdf_config.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | moveit_setup::SRDFConfig |
| class | moveit_setup::SRDFConfig::GeneratedSRDF |
| class | moveit_setup::SRDFConfig::GeneratedJointLimits |
| class | moveit_setup::SRDFConfig::GeneratedCartesianLimits |
Namespaces | |
| namespace | moveit_setup |
Enumerations | |
| enum | moveit_setup::InformationFields { moveit_setup::NONE = 0 , moveit_setup::COLLISIONS = 1 << 1 , moveit_setup::VIRTUAL_JOINTS = 1 << 2 , moveit_setup::GROUPS = 1 << 3 , moveit_setup::GROUP_CONTENTS = 1 << 4 , moveit_setup::POSES = 1 << 5 , moveit_setup::END_EFFECTORS = 1 << 6 , moveit_setup::PASSIVE_JOINTS = 1 << 7 , moveit_setup::OTHER = 1 << 8 } |