#include <rclcpp/logger.hpp>
#include <rclcpp/logging.hpp>
#include <limits>
#include <Eigen/Geometry>
#include <algorithm>
#include <cmath>
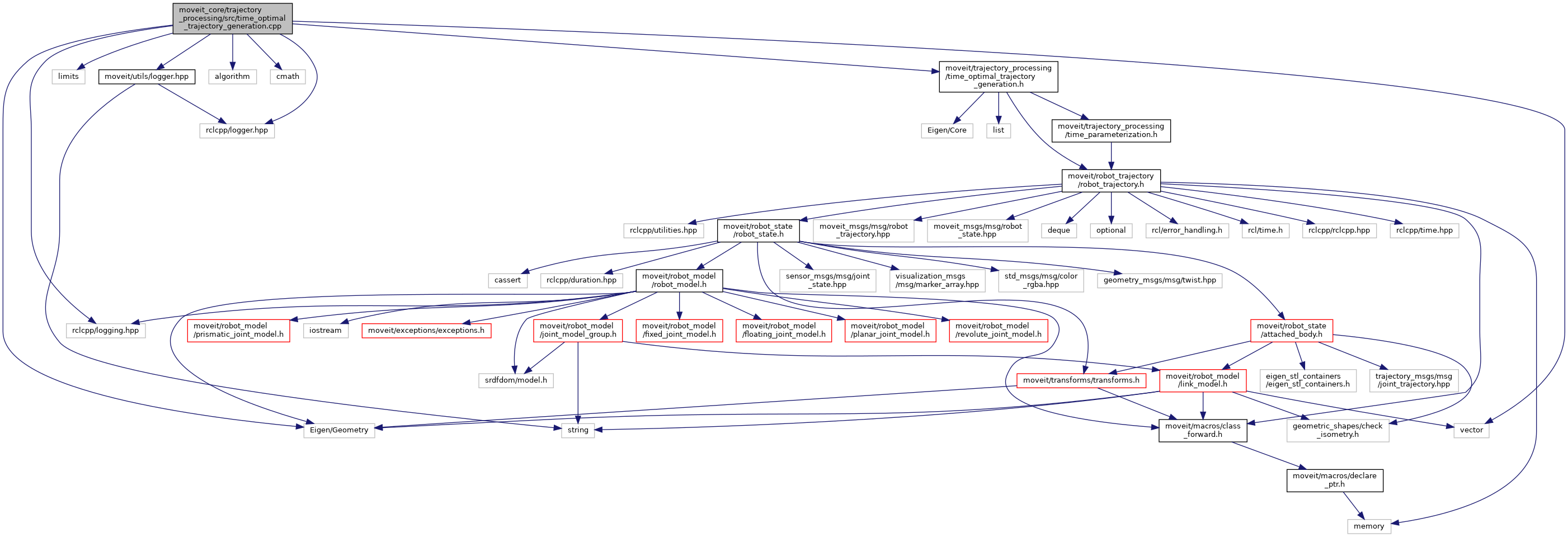
#include <moveit/trajectory_processing/time_optimal_trajectory_generation.hpp>
#include <vector>
#include <moveit/utils/logger.hpp>
Go to the source code of this file.
|
| bool | trajectory_processing::totgComputeTimeStamps (const size_t num_waypoints, robot_trajectory::RobotTrajectory &trajectory, const double max_velocity_scaling_factor=1.0, const double max_acceleration_scaling_factor=1.0) |
| | Compute a trajectory with the desired number of waypoints. Resampling the trajectory doesn't change the start and goal point, and all re-sampled waypoints will be on the path of the original trajectory (within path_tolerance_). However, controller execution is separate from MoveIt and may deviate from the intended path between waypoints. path_tolerance_ is defined in configuration space, so the unit is rad for revolute joints, meters for prismatic joints. This is a free function because it needs to modify the const resample_dt_ member of TimeOptimalTrajectoryGeneration class.
|
| |