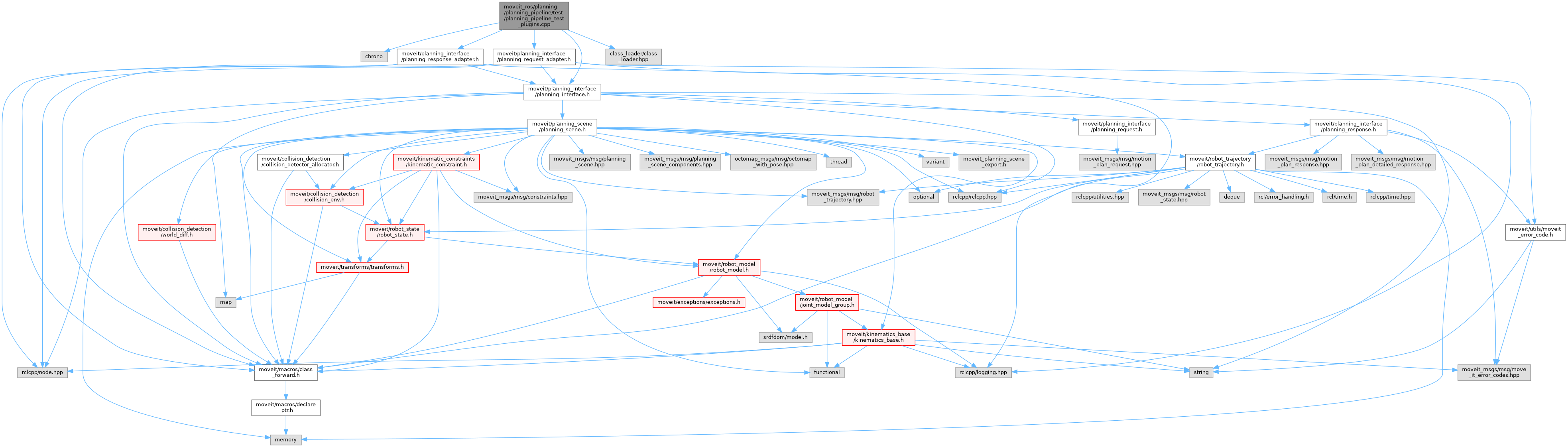
#include <chrono>#include <moveit/planning_interface/planning_interface.hpp>#include <moveit/planning_interface/planning_request_adapter.hpp>#include <moveit/planning_interface/planning_response_adapter.hpp>#include <class_loader/class_loader.hpp>
Include dependency graph for planning_pipeline_test_plugins.cpp:
Go to the source code of this file.
Classes | |
| class | planning_pipeline_test::AlwaysSuccessRequestAdapter |
| A dummy request adapter that does nothing and is always successful. More... | |
| class | planning_pipeline_test::AlwaysSuccessResponseAdapter |
| A dummy response adapter that does nothing and is always successful. More... | |
| class | planning_pipeline_test::DummyPlanningContext |
| A dummy planning context that does nothing and is always successful. More... | |
| class | planning_pipeline_test::DummyPlannerManager |
| A dummy planning manager that does nothing. More... | |
Namespaces | |
| namespace | planning_pipeline_test |